Introducción a las matemáticas de la relatividad general
- Este artículo es una introducción no técnica al tema. Para consultar el artículo principal de la enciclopedia, consúltese matemáticas de la relatividad general

Las matemáticas de la relatividad general son complicadas. En las teorías del movimiento de Newton, la longitud de un objeto y la velocidad a la que pasa el tiempo permanecen constantes mientras el objeto se acelera, lo que significa que muchos problemas en mecánica newtoniana pueden resolverse utilizando álgebra únicamente. En la relatividad, sin embargo, la longitud de un objeto y la velocidad a la que pasa el tiempo cambian apreciablemente a medida que la velocidad del objeto se acerca a la velocidad de la luz, lo que significa que se requieren más variables y matemáticas más complicadas para calcular el movimiento del objeto. Como resultado, la relatividad requiere el uso de conceptos como vectores, tensores, seudotensores y coordenadas curvilíneas.
Para una introducción basada en el ejemplo de partículas que siguen órbitas circulares alrededor de una masa muy grande, se dan tratamientos relativistas y no relativistas en los artículos motivaciones newtonianas de la relatividad general y motivaciones teóricas para la relatividad general, respectivamente.
Vectores y tensores
[editar]Vectores
[editar]
En matemáticas, física e ingeniería, un vector euclídeo (a veces llamado geométrico[1] o vector espacial,[2] o, como aquí, simplemente un vector) es un objeto geométrico que tiene magnitud (o longitud), dirección y sentido. Un vector es lo que se necesita para "llevar" el punto A al punto B. La palabra latina vector significa "el que lleva".[3] La magnitud del vector es la distancia entre los dos puntos, la dirección se refiere a la recta sobre la que se produce el desplazamiento de A a B, y el sentido hace referencia al orden en el que se recorren los puntos (primero A y luego B). Muchas operaciones algebraicas con números reales, como la adición, la resta, la multiplicación y la negación, tienen análogos cuando se trabaja con vectores. Y además, estas operaciones obedecen a las familiares leyes algebraicas de conmutatividad, asociatividad y distributividad.
Tensores
[editar]
Un tensor extiende el concepto de vector a direcciones adicionales. Un escalar, es decir, un número simple sin dirección, se mostraría en un gráfico como un punto, un objeto de dimensión cero. Un vector, que tiene magnitud y dirección, aparecería en un gráfico como un segmento rectilíneo, que es un objeto unidimensional. Un vector es un tensor de primer orden, ya que tiene una dirección. Un tensor de segundo orden tiene dos magnitudes y dos direcciones, y aparecería en un gráfico como dos líneas similares a las manecillas de un reloj. El "orden" de un tensor es el número de direcciones contenidas en su interior, un concepto que está separado de las dimensiones de las direcciones individuales. Un tensor de segundo orden en dos dimensiones podría representarse matemáticamente mediante una matriz de 2 por 2 y en tres dimensiones mediante una matriz de 3 por 3, pero en ambos casos la matriz es "cuadrada" para un tensor de segundo orden. Un tensor de tercer orden tiene tres magnitudes y direcciones, y estaría representado por un cubo de números, 3 por 3 por 3 para direcciones en tres dimensiones, y así sucesivamente para dimensiones superiores.
Aplicaciones
[editar]Los vectores son fundamentales en las ciencias físicas. Se pueden utilizar para representar cualquier cantidad que tenga magnitud, dirección y sentido, como la velocidad, cuya magnitud es la celeridad. Por ejemplo, una velocidad de "5 metros por segundo hacia arriba" podría representarse mediante el vector (0, 5) (en 2 dimensiones con el eje positivo y como "arriba"). Otra cantidad representada por un vector es la fuerza, ya que posee magnitud, dirección y sentido. Los vectores también describen muchas otras cantidades físicas, como desplazamientos, aceleraciones, cantidad de movimiento y momento angular. Otros vectores físicos, como el campo eléctrico y el campo magnético, se representan como un sistema de vectores en cada punto de un espacio físico; es decir, lo que se denomina un campo vectorial.
Los tensores también tienen amplias aplicaciones en física:
- El tensor de campo electromagnético (o tensor de Faraday) en electromagnetismo
- Los tensores de deformación finita para describir deformaciones y el tensor deformación para modelizar tensiones en mecánica de medios continuos
- La permitividad y la susceptibilidad eléctrica se representan mediante tensores en medios anisótropos
- El tensor de energía-impulso en la relatividad general, usado para representar flujos de cantidad de movimiento
- Los operadores tensoriales esféricos son las funciones propias del operador cuántico momento angular en coordenadas esféricas
- Los tensores de difusión, base de las imágenes del tensor de difusión, que representan tasas de difusión en entornos biológicos
Dimensiones
[editar]En la relatividad general, se requieren vectores de cuatro dimensiones, denominados cuadrivectores. Estas cuatro dimensiones son largo, alto, ancho y tiempo. Un "punto" en este contexto sería un evento, ya que está asociado tanto a un lugar como a un tiempo. Al igual que los vectores, los tensores en relatividad requieren cuatro dimensiones. Un ejemplo es el tensor de curvatura.
Transformación de coordenadas
[editar]-
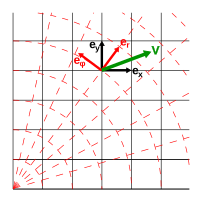 Se muestra un vector v con dos cuadrículas de coordenadas, ex y er. En el espacio, no existe una cuadrícula de coordenadas preferente para usarla. Esto significa que el sistema de coordenadas cambia según la ubicación y la orientación del observador. Los observadores ex y er en esta imagen miran en direcciones diferentes.
Se muestra un vector v con dos cuadrículas de coordenadas, ex y er. En el espacio, no existe una cuadrícula de coordenadas preferente para usarla. Esto significa que el sistema de coordenadas cambia según la ubicación y la orientación del observador. Los observadores ex y er en esta imagen miran en direcciones diferentes. -
 Aquí se observa que ex y er ven el vector de manera diferente. La dirección del vector es la misma. Pero para ex, el vector se mueve hacia su izquierda; y para er, el vector se mueve hacia su derecha.
Aquí se observa que ex y er ven el vector de manera diferente. La dirección del vector es la misma. Pero para ex, el vector se mueve hacia su izquierda; y para er, el vector se mueve hacia su derecha.


En física, así como en matemáticas, un vector a menudo se identifica con una tupla, o lista de números, que dependen de un sistema de coordenadas o sistema de referencia. Si las coordenadas se transforman, como cuando por ejemplo se produce una rotación o un estiramiento del sistema de coordenadas, las componentes del vector también se transforman. El vector en sí no cambia, pero el sistema de referencia sí. Esto significa que las componentes del vector tienen que modificarse para compensar el cambio del sistema de referencia.
El vector se llama covariante o contravariante dependiendo de cómo se relaciona la transformación de las componentes del vector con la transformación de coordenadas.
- Los vectores contravariantes tienen unidades de distancia (como un desplazamiento) o una distancia multiplicada por alguna otra unidad (como la velocidad o la aceleración) y se transforman de manera opuesta al sistema de coordenadas. Por ejemplo, al cambiar unidades de metros a milímetros, las unidades de las coordenadas se vuelven más pequeñas, pero los números en un vector se hacen más grandes: 1 m se convierte en 1000 mm.
- Los vectores covariantes, por otro lado, tienen unidades relativas a la distancia, como en el caso de un gradiente (en el que se especifica la variación de una magnitud por unidad de distancia) y se transforman de la misma manera que el sistema de coordenadas. Por ejemplo, al cambiar de metros a milímetros, las unidades de coordenadas se vuelven más pequeñas y el número que mide un gradiente también se hará más pequeño: 1 Kelvin por m se convierte en 0,001 Kelvin por mm.
Según el convenio de suma de Einstein, los vectores contravariantes y las componentes contravariantes de los tensores se especifican con superíndices, como por ejemplo xi; y los vectores covariantes y las componentes covariantes de los tensores se especifican con subíndices, como por ejemplo xi. Los índices se "suben" o "bajan" mediante la multiplicación por una matriz apropiada, a menudo la matriz de identidad.
La transformación de coordenadas es importante porque la relatividad establece que no hay perspectiva o punto de referencia que pueda considerarse universalmente ventajoso. En la Tierra se utilizan dimensiones como longitud, latitud y elevación, que se emplean en todo el planeta. No existe tal sistema para el espacio. Sin una cuadrícula de referencia clara, resulta más preciso describir las cuatro dimensiones como hacia/lejos, izquierda/derecha, arriba/abajo y pasado/futuro. Como evento de ejemplo, supóngase que la Tierra es un objeto inmóvil y considérese la firma de la Declaración de Independencia de los Estados Unidos. Para un observador moderno situado en el monte Rainier y que mire hacia el este, el evento está adelante, a la derecha, abajo y en el pasado. Sin embargo, para un observador de la Inglaterra medieval que mire hacia el norte, el acontecimiento está detrás, a la izquierda, ni arriba ni abajo, y en el futuro. El acontecimiento en sí no ha cambiado, pero la ubicación del observador sí.
Ejes oblicuos
[editar]Un oblique coordinate system es aquel en el que los ejes no son necesariamente orthogonal entre sí; es decir, se encuentran en ángulos distintos al ángulo recto. Cuando se utilizan transformaciones de coordenadas como se describe anteriormente, el nuevo sistema de coordenadas a menudo parecerá tener ejes oblicuos en comparación con el sistema anterior.
No tensores
[editar]Un no tensor o seudotensor es una cantidad similar a un tensor que se comporta como un tensor al subir y bajar índices, pero que no se transforma como un tensor bajo una transformación de coordenadas. Por ejemplo, los símbolos de Christoffel (que facilitan el cálculo de la transformación de las coordenadas entre dos sistemas de referencia distintos) no pueden ser tensores en sí mismos si las coordenadas no cambian de forma lineal.
En la relatividad general, no se puede describir la energía y el momento del campo gravitatorio mediante un tensor de energía-momento. En cambio, se introducen objetos que se comportan como tensores solo con respecto a transformaciones de coordenadas restringidas. Estrictamente hablando, estos objetos no son tensores en absoluto. Un ejemplo famoso de este tipo de elementos es el seudotensor de Landau-Lifshitz.
Coordenadas curvilíneas y espacio-tiempo curvo
[editar]Las coordenadas curvilíneas son coordenadas en las que los ángulos entre los ejes pueden cambiar de un punto a otro. Esto significa que en lugar de tener una cuadrícula de líneas rectas, la cuadrícula está formada por líneas curvas.
Un buen ejemplo de esto es la superficie de la Tierra. Si bien los mapas suelen representar el norte, el sur, el este y el oeste como una simple cuadrícula, en realidad ese no es el caso. En cambio, las líneas de longitud que van de norte a sur son curvas y se encuentran en el polo norte. Esto es debido a que la Tierra es aproximadamente una esfera.
En la relatividad general, la energía y la masa tienen efectos de curvatura en las cuatro dimensiones del universo (= espacio-tiempo). Esta curvatura da lugar a la fuerza gravitatoria. Una analogía común es colocar un objeto pesado sobre una lámina de goma estirada, haciendo que la lámina se doble hacia abajo. Esto curva el sistema de coordenadas alrededor del objeto, de manera muy similar a como un objeto en el universo curva el sistema de coordenadas en el que se encuentra. Las matemáticas aquí son conceptualmente más complejas que en la Tierra, ya que dan como resultado cuatro dimensiones de coordenadas curvas en lugar de tres como se usa para describir una superficie curva en 2D.
Transporte paralelo
[editar]
El intervalo en un espacio de dimensión alta
[editar]En un espacio euclídeo, la separación entre dos puntos se mide por la distancia entre los dos puntos. La distancia es puramente espacial y siempre positiva. En el espacio-tiempo, la separación entre dos eventos se mide por el intervalo invariante entre los dos eventos, que tiene en cuenta no solo la separación espacial entre los eventos, sino también su separación en el tiempo. El intervalo entre dos eventos, s2, se define como:
- (intervalo espacio-tiempo),

donde c es la velocidad de la luz, y Δr y Δt denotan diferencias de las coordenadas espaciales y temporales, respectivamente, entre los eventos. La elección de signos para s2 anterior sigue la convención espacial (−+++). Una notación como Δr2 significa que (Δr)2. La razón por la que se llama intervalo a s2 (y no a s) es que s2 puede ser positiva, cero o negativa.
Los intervalos espacio-temporales se pueden clasificar en tres tipos distintos, en función de si la separación temporal (c2Δt2) o espacial (Δr2) de los dos eventos es mayor: temporales, lumínicos o espaciales.
Ciertos tipos de líneas del universo se denominan líneas geodésicas del espacio-tiempo: líneas rectas en el caso del espacio-tiempo plano de Minkowski y su equivalente más cercano en el espacio-tiempo curvo de la relatividad general. En el caso de caminos puramente temporales, las geodésicas son (localmente) los caminos de mayor separación (intervalo de espacio-tiempo) medido en el camino entre dos eventos, mientras que en el espacio euclídeo y en las variedades de Riemann, las geodésicas son los caminos de distancia más corta entre dos puntos.[4][5] El concepto de geodésicas se vuelve central en la relatividad general, ya que el movimiento geodésico puede considerarse como un "movimiento puro" (movimiento inercial) en el espacio-tiempo, es decir, libre de influencias externas.
Derivada covariante
[editar]La derivada covariante es una generalización de la derivada direccional del cálculo vectorial. Al igual que con la derivada direccional, la derivada covariante es una regla que toma como entradas: (1) un vector, u, (en el que se toma la derivada) definido en un punto P, y (2) un campo vectorial, v , definido en un entorno de P. El resultado es un vector, también con origen en el punto P. La principal diferencia con la derivada direccional habitual es que la derivada covariante debe, en cierto sentido preciso, ser independiente de la manera en que se exprese en un sistema de coordenadas.
Transporte paralelo
[editar]Dada la derivada covariante, se puede definir el transporte paralelo de un vector v en un punto P en una curva γ que comienza en P. Para cada punto x de γ, el transporte paralelo de v en x será función de x y se puede escribir como v(x), donde v(0) = v. La función v está determinada por el requisito de que la derivada covariante de v(x) en γ sea 0. Esto es similar al hecho de que una función constante es aquella cuya derivada es constantemente 0.
Símbolos de Christoffel
[editar]La ecuación de la derivada covariante se puede escribir en términos de símbolos de Christoffel, que encuentran un uso frecuente en la teoría de Einstein de la relatividad general, donde el espacio-tiempo está representado por una variedad de Lorentz curva de 4 dimensiones con una conexión de Levi-Civita. Las ecuaciones del campo de Einstein, que determinan la geometría del espacio-tiempo en presencia de materia, contienen el tensor de Ricci. Dado que el tensor de Ricci se deriva del tensor de curvatura de Riemann, que puede escribirse en términos de símbolos de Christoffel, es esencial un cálculo de estos símbolos. Una vez determinada la geometría, mediante la resolución de las ecuaciones geodésicas se calculan las trayectorias de las partículas y de los haces de luz, para lo que se emplean explícitamente los símbolos de Christoffel.
Geodésicas
[editar]En la relatividad general, una geodésica generaliza la noción de "línea recta" al espacio-tiempo curvo. Es importante destacar que la línea de universo de una partícula libre de toda fuerza externa no gravitacional es un tipo particular de geodésica. En otras palabras, una partícula que se mueve o cae libremente siempre se mueve en una geodésica.
En la relatividad general, la gravedad no puede considerarse una fuerza sino una consecuencia de una geometría espacio-temporal curvada, donde la fuente de curvatura es el tensor de energía-impulso (que representa la materia, por ejemplo). Así, por ejemplo, la trayectoria de un planeta que orbita alrededor de una estrella es la proyección de una geodésica de la geometría espacio-temporal curvada de 4 dimensiones alrededor de la estrella en un espacio de 3 dimensiones.
Una curva es geodésica si el vector tangente de la curva en cualquier punto es igual al transporte paralelo del vector tangente del punto base.
Tensor de curvatura
[editar]El tensor de curvatura Rρσμν indica, matemáticamente, el grado de curvatura existente en una región determinada del espacio. En el espacio plano este tensor es cero.
Al contraer el tensor se producen dos objetos matemáticos más:
- El tensor de Ricci: Rσν, surge de la necesidad en la teoría de Einstein de un tensor de curvatura con solo 2 índices. Se obtiene promediando ciertas porciones del tensor de curvatura de Riemann.
- La curvatura escalar: R, la medida de curvatura más simple, asigna un único valor escalar a cada punto de un espacio. Se obtiene promediando el tensor de Ricci.
El tensor de curvatura de Riemann se puede expresar en términos de la derivada covariante.
El tensor de Einstein G es un tensor de rango 2 definido sobre variedades pseudoriemannianas. En notación libre de índices se define como

donde R es el tensor de Ricci, g es el tensor métrico y R es la curvatura escalar. Se utiliza en las ecuaciones del campo de Einstein.
Tensor de energía-impulso
[editar]
El tensor de energía-impulso (a veces denominado tensor de tensión-energía o tensor de energía-momento) es una cantidad tensorial utilizada en física para describir la densidad y el flujo de energía y la cantidad de movimiento en el espacio-tiempo, generalizando el tensor de tensiones de la física newtoniana. Es un atributo de la materia, la radiación y campos de fuerza no gravitacionales. El tensor tensión-energía es la fuente del campo gravitatorio en las ecuaciones del campo de Einstein en la relatividad general, así como la densidad de masa es la fuente de dicho campo en la ley de gravitación universal newtoniana. Debido a que este tensor tiene dos índices (véase la siguiente sección), el tensor de curvatura de Riemann debe contraerse en el tensor de Ricci, también con dos índices.
Ecuación de Einstein
[editar]Las ecuaciones de campo de Einstein (ECE) o ecuaciones de Einstein son un conjunto de 10 ecuaciones en la teoría general de la relatividad de Albert Einstein, que describen las interacciones fundamentales de la gravedad como resultado de que el espacio-tiempo sea curvado por la materia y la energía.[6] Publicadas por primera vez por Einstein en 1915[7] como tensor, las ecuaciones de campo de Einstein equiparan la curvatura del espacio-tiempo local (expresada por el tensor de Einstein) con la energía local y la cantidad de movimiento dentro de ese espacio-tiempo (expresadas por el tensor de energía-impulso).[8]
Las ecuaciones de campo de Einstein se pueden escribir como

donde Gμν es el tensor de Einstein y Tμν es el tensor de energía-impulso.
Esto implica que la curvatura del espacio (representada por el tensor de Einstein) está directamente relacionada con la presencia de materia y energía (representada por el tensor de tensión-energía).
Solución de Schwarzschild y agujeros negros
[editar]En la teoría de Einstein de relatividad general, la métrica de Schwarzschild (también vacío de Schwarzschild o solución de Schwarzschild), es una solución al Ecuaciones del campo de Einstein que describe el campo gravitatorio fuera de una masa esférica. , suponiendo que el carga eléctrica de la masa, el momento angular de la masa y el constante cosmológica universal son todos cero. La solución es una aproximación útil para describir objetos astronómicos que giran lentamente, como muchos estrella y planeta, incluidos la Tierra y el Sol. La solución lleva el nombre de Karl Schwarzschild, quien la publicó por primera vez en 1916, justo antes de su muerte.
Según el teorema de Birkhoff, la métrica de Schwarzschild es la simétrica esférica más general, solución del vacío de las ecuaciones del campo de Einstein. Un agujero negro de Schwarzschild o un agujero negro estático es un tipo de agujero negro que no tiene carga ni momento angular. Un agujero negro de Schwarzschild se describe mediante la métrica de Schwarzschild, y no se puede distinguir de ningún otro agujero negro de Schwarzschild excepto por su masa.
Véase también
[editar]Referencias
[editar]- ↑ Ivanov, 2001
- ↑ Heinbockel, 2001
- ↑ From Latin vectus, participio de vehere, "llevar". Para conocer el desarrollo histórico de la palabra "vector", consulte Real Academia Española. «vector». Diccionario de la lengua española (23.ª edición). y Jeff Miller. «Earliest Known Uses of Some of the Words of Mathematics». Consultado el 25 de mayo de 2007.
- ↑ Esta caracterización no es universal: los dos arcos entre dos puntos de una circunferencia máxima sobre una esfera son líneas geodésicas.
- ↑ Berry, Michael V. (1989). Principles of Cosmology and Gravitation. CRC Press. p. 58. ISBN 0-85274-037-9.
- ↑ Einstein, Albert (1916). «The Foundation of the General Theory of Relativity» (PDF). Annalen der Physik 354 (7): 769. Bibcode:1916AnP...354..769E. doi:10.1002/andp.19163540702. Archivado desde el original el 29 de agosto de 2006.
- ↑ Einstein, Albert (25 de noviembre de 1915). «Die Feldgleichungen der Gravitation». Sitzungsberichte der Preussischen Akademie der Wissenschaften zu Berlin: 844-847. Consultado el 12 de septiembre de 2006.
- ↑ Misner, Charles W.; Thorne, Kip S.; Wheeler, John Archibald (1973). Gravitation. San Francisco: W. H. Freeman. ISBN 978-0-7167-0344-0. Chapter 34, p 916
Bibliografía
[editar]- P. A. M. Dirac (1996). General Theory of Relativity. Princeton University Press. ISBN 0-691-01146-X.
- Heinbockel, J. H. (2001), Introduction to Tensor Calculus and Continuum Mechanics, Trafford Publishing, ISBN 1-55369-133-4..
- Ivanov, A.B. (2001), «Introducción a las matemáticas de la relatividad general», en Hazewinkel, Michiel, ed., Encyclopaedia of Mathematics (en inglés), Springer, ISBN 978-1556080104..
- Misner, Charles; Thorne, Kip S.; Wheeler, John Archibald (1973). Gravitation. San Francisco: W. H. Freeman. ISBN 0-7167-0344-0.
- Landau, L. D.; Lifshitz, E. M. (1975). Classical Theory of Fields (Fourth Revised English edición). Oxford: Pergamon. ISBN 0-08-018176-7.
- R. P. Feynman; F. B. Moringo; W. G. Wagner (1995). Feynman Lectures on Gravitation. Addison-Wesley. ISBN 0-201-62734-5.
- Einstein, A. (1961). Relativity: The Special and General Theory. New York: Crown. ISBN 0-517-02961-8.
- Carrol, Sean M. (1997). «Apuntes de Clases: Sobre la Relatividad General». arXiv:gr-qc/9712019: 1-234. (en español)
| Control de autoridades |
|
|---|
 Datos: Q6058963
Datos: Q6058963