Introduction aux mathématiques de la relativité générale
Cet article concerne une introduction accessible, non technique, au sujet. Pour un article plus technique, voir Mathématiques de la relativité générale.
Les mathématiques de la relativité générale sont complexes. Dans la théorie du mouvement de Newton, la longueur d'un objet et la vitesse à laquelle le temps s'écoule restent constantes même lorsque l'objet accélère. Cela signifie que de nombreux problèmes de mécanique newtonienne peuvent être résolus uniquement en utilisant l'algèbre. Mais en relativité, la longueur d'un objet et la vitesse à laquelle le temps s'écoule changent sensiblement à mesure que la vitesse de l'objet se rapproche de la vitesse de la lumière. Pour cette raison, il est nécessaire d'introduire davantage de variables et des lois mathématiques plus compliquées pour calculer le mouvement de l'objet. En conséquence, la relativité nécessite l'utilisation de concepts tels que les vecteurs, les tenseurs, les pseudotenseurs (en) et les coordonnées curvilignes.
Vecteurs et tenseurs
[modifier | modifier le code]Vecteurs
[modifier | modifier le code]
En mathématiques, en physique et en ingénierie, un vecteur est un objet géométrique qui a à la fois une longueur (ou norme) et une direction. Un vecteur est ce qui permet de « transporter » un point A vers un point B ; le mot latin « vector » signifie « celui qui porte »[a]. On le note , ou simplement . La longueur du vecteur est la distance entre les deux points, et la direction fait référence à la direction du déplacement de A vers B. De nombreuses opérations algébriques que l'on a l'habitude d'utiliser avec les nombres réels, telles que l'addition, la soustraction, la multiplication et la négation, ont des analogues pour les vecteurs. Ces opérations obéissent aux lois algébriques familières de la commutativité, de l'associativité et de la distributivité.


Tenseurs
[modifier | modifier le code]
Un tenseur est une extension du concept de vecteur à des directions supplémentaires. Un scalaire, c'est-à-dire un nombre simple sans direction, est représenté sur un graphique par un point, qui est un objet de dimension zéro. Un vecteur, qui a une longueur et une direction, apparaît sur un graphique sous la forme d'une ligne, qui est un objet de dimension un. Un vecteur est un tenseur du premier ordre, car il possède une direction. Un tenseur du deuxième ordre a deux longueurs et deux directions. Il apparaît sur un graphique sous la forme de deux lignes semblables aux aiguilles d'une horloge. L'« ordre » d'un tenseur est le nombre de directions qui le composent. L'ordre ne doit pas être confondu avec le nombre de dimensions utilisées pour représenter les directions. Par exemple, un vecteur d'un plan est un tenseur du premier ordre dont la direction est de dimension deux (celle du plan). Un vecteur de l'espace physique est lui aussi un tenseur du premier ordre, mais sa direction est de dimension trois (celle de l'espace). Un tenseur du deuxième ordre en deux dimensions peut être représenté mathématiquement par une matrice 2 x 2, et en trois dimensions par une matrice 3 x 3, mais dans les deux cas, la matrice d'un tenseur du deuxième ordre est « carrée » (elle a le même nombre de lignes que de colonnes). Un tenseur du troisième ordre a trois longueurs et trois directions. Il se représente par un cube de nombres, 2 x 2 x 2 en dimension 2 et 3 x 3 x 3 en dimension 3. Il n'y a pas de limite théorique à l'ordre d'un tenseur, mais la représentation d'un tenseur d'ordre supérieur à trois doit faire preuve d'imagination. On parle alors d'un hypercube : 4-cube, ... , n-cube, ... , etc.
Applications
[modifier | modifier le code]Les vecteurs sont fondamentaux dans les sciences physiques. Ils peuvent être utilisés pour représenter n'importe quelle quantité qui a à la fois une grandeur et une direction. Un exemple est la représentation de la vitesse d'un objet par un vecteur vitesse (on parle parfois de vélocité). La grandeur est la vitesse de l'objet et la direction indique le sens du mouvement. Par exemple, une vitesse de 5 mètres par seconde vers le haut pourrait être représentée par le vecteur (0, 0, 5) (en dimension 3 avec l'axe z positif comme indiquant la direction verticale vers le haut). Une autre grandeur représentée par un vecteur est la force; elle a également une grandeur (une intensité) et une direction. Les vecteurs décrivent également de nombreuses autres quantités physiques, telles que les déplacements, les accélérations, la quantité de mouvement et le moment cinétique. Certaines autres grandeurs physiques, tels que le champ électrique et le champ magnétique, sont représentés comme un système de vecteurs en chaque point de l'espace physique. On parle alors d'un champ de vecteurs.
Les tenseurs ont, eux aussi, de nombreuses applications en physique :
- en électromagnétisme, on utilise le tenseur électromagnétique (ou tenseur de Faraday) ;
- en mécanique des milieux continus, on utilise le tenseur des déformations pour décrire les déformations d'un matériau ou d'un fluide sous l'effet de contraintes ;
- la permittivité diélectrique et la susceptibilité électrique sont des tenseurs dans les milieux anisotropes ;
- en relativité générale, on utilise le tenseur énergie-impulsion pour représenter les flux de quantité de mouvement ;
- les opérateurs tensoriels sphériques sont les fonctions propres de l'opérateur de moment cinétique quantique en coordonnées sphériques ;
- les tenseurs de diffusion, à la base de l'imagerie par résonance magnétique de diffusion, représentent les taux de diffusion dans les environnements biologiques.
Dimensions
[modifier | modifier le code]En relativité générale, des vecteurs de dimension 4, des quadrivecteurs, sont nécessaires. Les quatre dimensions sont la longueur, la hauteur, la largeur et le temps. Un « point » dans ce contexte s'appelle un événement, car il représente à la fois un lieu et un instant. De la même façon que les quadrivecteurs, les tenseurs en relativité nécessitent quatre dimensions. Un exemple est le tenseur de courbure de Riemann-Christoffel (ou plus simplement tenseur de Riemann).
Système de coordonnées
[modifier | modifier le code]-
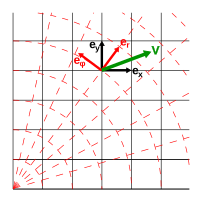 Un vecteur (en vert) est représenté avec deux grilles de coordonnées : (en coordonnées cartésiennes en noir) et (en coordonnées polaires en rouge). En coordonnées polaires, le système de coordonnées n'est pas le même selon l'emplacement de l'observateur. Sur cette image, les observateurs et sont orientés dans des directions différentes.
Un vecteur (en vert) est représenté avec deux grilles de coordonnées : (en coordonnées cartésiennes en noir) et (en coordonnées polaires en rouge). En coordonnées polaires, le système de coordonnées n'est pas le même selon l'emplacement de l'observateur. Sur cette image, les observateurs et sont orientés dans des directions différentes. -
 Ci-dessus, les deux systèmes de coordonnées ont été alignés, ce qui permet de constater que et voient le vecteur différemment. La direction du vecteur est la même, mais pour , le vecteur se dirige vers la gauche, alors que pour , il se dirige vers la droite.
Ci-dessus, les deux systèmes de coordonnées ont été alignés, ce qui permet de constater que et voient le vecteur différemment. La direction du vecteur est la même, mais pour , le vecteur se dirige vers la gauche, alors que pour , il se dirige vers la droite.




En physique, ainsi qu'en mathématiques, un vecteur est souvent identifié par ces composantes, une liste de nombres (un uplet) qui dépendent d'un système de coordonnées (un référentiel), qui permet de repérer les positions et les mouvements dans l'espace. Dans l'espace de dimension 3, le système de coordonnées cartésiennes est couramment utilisé. Il est formé de trois vecteurs de base , représentant trois directions fixes de l'espace. Un vecteur quelconque est repéré à l'aide de trois composantes , qui représentent le nombre de fois que chacun des trois vecteurs de base sont ajoutés pour produire le même « transport » que le vecteur . Dans de nombreuses applications, il est intéressant d'utiliser un système de coordonnées orthogonal, dans lequel les trois vecteurs de base sont deux à deux orthogonaux.


Transformation de coordonnées
[modifier | modifier le code]Si le système de coordonnées est transformé, par exemple par rotation autour d'une ou plusieurs des trois directions ou par allongement d'un ou plusieurs des vecteurs de base, les composantes d'un vecteur exprimé dans ce système de coordonnées se transforment également. Le vecteur lui-même ne change pas, mais le référentiel ayant changé, les composantes du vecteur doivent changer pour compenser. Par exemple, un vecteur de deux centimètres dans la direction de l'axe des aura pour composantes si l'objet servant de référence fait un centimètre de long, mais il aura pour composantes si l'objet servant de référence ne fait qu'un millimètre de long.



Un vecteur est dit covariant ou contravariant suivant la façon dont la transformation des coordonnées affecte la transformation des composantes du vecteur :
- les vecteurs contravariants ont des unités de distance (telles qu'un déplacement) ou de distance multipliée (ou divisée) par une autre unité (telle que la vitesse ou l'accélération). Ils se transforment de manière opposée au système de coordonnées. Par exemple, en changeant les unités de mètres en millimètres, les unités définissant les coordonnées deviennent plus petites, mais les composantes du vecteur deviennent plus grandes : 1 m devient 1 000 mm ;
- les vecteurs covariants ont des unités qui sont l'inverse d'une distance multipliée (ou divisée) par une autre unité (comme dans le cas du gradient). Ils se transforment de la même manière que le système de coordonnées. Par exemple, en passant du mètre au millimètre, les unités des coordonnées deviennent plus petites et les composantes du vecteur deviennent également plus petites : 1 K/m devient 0,001 K/mm.
Dans la notation d'Einstein[1], les composantes des vecteurs contravariants et les composantes contravariantes des tenseurs sont représentées par des indices hauts, par exemple . Les composantes des vecteurs covariants et les composantes covariantes des tenseurs sont représentées par des indices bas, par exemple . Les indices peuvent être « élevés » ou « abaissés » par multiplication par une matrice appropriée, souvent la matrice identité.


Les transformations de coordonnées sont importantes parce que la relativité stipule qu'il n'existe aucun point de référence dans l'univers qui puisse être plus favorisé qu'un autre. Sur terre, nous utilisons des dimensions comme la latitude, la longitude et l'altitude, qui sont utilisées sur toute la planète par rapport à un point de référence (l'intersection de l'équateur, du méridien de Greenwich et du niveau de la mer). Un tel système n'existe pas dans l'espace. Sans un point de référence clairement défini, il devient plus précis de décrire les quatre dimensions comme devant/derrière, gauche/droite, haut/bas et passé/futur. Comme exemple d'événement, supposons que la Terre soit un objet immobile et considérons la signature de la Déclaration des droits de l'homme et du citoyen. Pour un observateur moderne sur le mont Blanc et regardant vers l'est, l'événement est derrière, à gauche, en bas et dans le passé. Cependant, pour un observateur de l'Angleterre médiévale regardant vers l'est, l'événement est devant, à droite, ni en haut ni en bas, et dans le futur. L'événement lui-même n'a pas changé : c'est la position de l'observateur qui a changé.
Axes non orthogonaux
[modifier | modifier le code]Un système de coordonnées non orthogonal est un système dans lequel les directions ne sont pas nécessairement orthogonales les unes par rapport aux autres, c'est-à-dire qu'elles se rencontrent à des angles autres que des angles droits de 90 degrés. Lors de l'utilisation de transformations de coordonnées telles que décrites ci-dessus, le système de coordonnées transformé semblera souvent avoir des axes non orthogonaux par rapport au système initial.
Pseudo-tenseurs
[modifier | modifier le code]Un pseudo-tenseur est une quantité semblable à un tenseur, qui se comporte comme un tenseur en ce qui concerne l'augmentation et la diminution des indices, mais qui ne se transforme pas comme un tenseur lors d'une transformation de coordonnées. Par exemple, les symboles de Christoffel ne peuvent pas être considérés comme formant un tenseur lorsque les coordonnées ne se transforment pas de façon linéaire.
En relativité générale, on ne peut pas décrire l'énergie et la quantité de mouvement du champ gravitationnel par un tenseur. Au lieu de cela, on introduit des objets qui se comportent comme des tenseurs uniquement en ce qui concerne certaines transformations de coordonnées. À proprement parler, de tels objets ne sont pas des tenseurs. Un exemple célèbre est le pseudo-tenseur de Landau-Lifshitz.
Coordonnées curvilignes et espace-temps courbe
[modifier | modifier le code]
Les coordonnées curvilignes sont des coordonnées pour lesquelles l'axe d'une coordonnée en un point particulier de l'espace et l'axe de cette même coordonnée en un point proche du premier forment un angle. Cela signifie qu'au lieu d'avoir une grille de lignes droites pour représenter les coordonnées, la grille a plutôt la forme d'une courbe.
Un bon exemple de ceci est la surface de la Terre. Alors que les cartes présentent souvent les parallèles et les méridiens comme une simple grille carrée, ce n'est en fait pas le cas. Au lieu de cela, les lignes des longitudes qui partent de l'équateur se rejoignent au pôle Nord et au pôle Sud. Ceci est la conséquence de la forme sphérique de la Terre.
En relativité générale, l'énergie et la masse ont des effets de courbure sur les quatre dimensions de l'univers (l'espace-temps). C'est cette courbure qui donne naissance à la force gravitationnelle. Une analogie courante consiste à placer un objet lourd sur une feuille de caoutchouc étirée, ce qui fait plier la feuille vers le bas. La déformation de la feuille de caoutchouc courbe le système de coordonnées autour de l'objet, un peu comme le Soleil courbe le système de coordonnées de l'espace autour de lui. Un objet qui passe à proximité du Soleil voit sa trajectoire suivre la courbure produite par la masse du Soleil et s'en rapproche. Attention : dans cette analogie de la feuille de caoutchouc, la courbure est visible car elle se produit dans la troisième dimension, alors que dans le cas de l'univers, les quatre dimensions sont courbées de façon intrinsèque, sans qu'il ne soit possible de parler d'une cinquième dimension (ou plus) qui permettrait de « voir » (du moins sur le plan mathématique), cette courbure. Les mathématiques qui modélisent la courbure de l'espace-temps sont conceptuellement plus complexes que celle de la feuille de caoutchouc, car elles se traduisent par un espace de dimension 4 et par des coordonnées courbes dont les calculs n'utilisent pas de dimensions supplémentaires, comme on le fait par exemple lorsque l'on décrire la surface d'une sphère (un espace de dimension 2) en dimension 3.
Transport parallèle
[modifier | modifier le code]










L'intervalle dans un espace de dimension élevée
[modifier | modifier le code]Dans un espace euclidien, la séparation entre deux points est mesurée par la distance entre les deux points. La distance est purement spatiale, et elle est toujours positive. Dans l'espace-temps, la séparation entre deux événements est mesurée par un intervalle qui prend en compte non seulement la séparation spatiale entre les événements, mais aussi leur séparation temporelle. L'intervalle est invariant par une transformation de coordonnées. C'est-à-dire que deux observateurs, même s'ils sont en mouvement l'un par rapport à l'autre, mesureront le même intervalle. L'intervalle, , entre deux événements est défini comme suit :

- (intervalle d'espace-temps),

où c est la vitesse de la lumière, et et dénotent respectivement les différences de coordonnées spatiales et temporelles entre les deux événements. Notons que signifie . Le choix des signes pour ci-dessus suit la convention de signes . La raison pour laquelle l'intervalle est et non est que peut être positif, nul ou négatif.






Les intervalles d'espace-temps peuvent être classés en trois genres distincts, suivant laquelle des deux séparations temporelle, ou spatiale , est la plus grande. On parle alors d'intervalle de genre temps ou de genre espace. Lorsque les deux sont égales, on parle d'intervalle de genre lumière.

Certains types de lignes d'univers (les trajectoires des objets dans l'espace-temps) sont appelées des géodésiques. Ce sont les lignes droites dans le cas de l'espace-temps plat de Minkowski et les lignes qui suivent la courbure de l'espace-temps courbe de la relativité générale. Dans le cas de chemins purement temporels (lorsque ), les géodésiques sont (localement) les chemins de plus grande séparation (intervalle d'espace-temps) mesurés entre deux événements, alors que dans l'espace euclidien, ainsi que dans les variétés riemanniennes, les géodésiques sont les chemins de distance la plus courte entre deux points[b],[2]. Le concept de géodésique devient central en relativité générale, car le mouvement géodésique peut être vu comme un « mouvement pur » (mouvement inertiel) de l'espace-temps, c'est-à-dire le mouvement d'un objet libre de toute influence extérieure (autre que celle de la gravitation, qui n'est plus considéré comme une force).

Dérivée covariante
[modifier | modifier le code]La dérivée covariante est une généralisation de la dérivée directionnelle du calcul vectoriel. Comme pour la dérivée directionnelle, la dérivée covariante est une règle qui prend comme variables d'entrée : (1) un vecteur , (le long duquel la dérivée est évaluée) défini en un point , et (2) un champ de vecteurs , défini dans un voisinage de . Le résultat est un vecteur, également défini au point . La principale différence avec la dérivée directionnelle habituelle est que la dérivée covariante doit, dans un certain sens précis, être indépendante de la manière dont elle est exprimée dans un système de coordonnées.


Transport parallèle
[modifier | modifier le code]Étant donné la dérivée covariante, on peut définir le transport parallèle d'un vecteur en un point le long d'une courbe partant de . Pour chaque point de , le transport parallèle de en est une fonction de , et peut être écrit comme , avec . La fonction est déterminée par l'exigence que la dérivée covariante de le long de doit être le vecteur nul . Ceci est similaire au fait qu'une fonction constante est une fonction dont la dérivée est constamment nulle. Le vecteur change de direction, mais c'est parce qu'il suit la courbure intrinsèque de l'espace.





Symboles de Christoffel
[modifier | modifier le code]L'équation de la dérivée covariante peut être exprimée à l'aide des symboles de Christoffel. Ces derniers sont utilisés en théorie de la relativité générale d'Einstein, dans laquelle l'espace-temps est représenté par une variété pseudo-riemannienne courbe d'un espace de dimension 4 avec une connexion de Lévi-Civita. Les équations de champ d'Einstein, qui déterminent la géométrie de l'espace-temps en présence de matière et d'énergie, contiennent le tenseur de Ricci. Puisque le tenseur de Ricci est dérivé du tenseur de courbure de Riemann, qui peut être écrit à l'aide des symboles de Christoffel, il est essentiel de calculer ces derniers. Une fois la géométrie déterminée, les trajectoires des particules et des faisceaux lumineux sont calculées en résolvant les équations des géodésiques dans lesquelles apparaissent explicitement les symboles de Christoffel.
Géodésiques
[modifier | modifier le code]En relativité générale, une géodésique généralise la notion de « ligne droite » à l'espace-temps courbe. Il est important de noter que la ligne d'univers d'une particule libre de toute force externe non gravitationnelle est un type particulier de géodésique. En d'autres termes, une particule se déplaçant librement, sous l'effet d'aucune force autre que celles de gravitation, (on parle alors de chute libre) se déplace toujours le long d'une géodésique.
En relativité générale, la gravité peut être considérée non pas comme une force mais comme la conséquence d'une géométrie d'espace-temps courbe, où la source de courbure est le tenseur énergie-impulsion, qui représente la matière et l'énergie présente dans l'espace. Ainsi, par exemple, la trajectoire d'une planète en orbite autour d'une étoile est la projection sur l'espace de dimension 3 d'une géodésique de l'espace-temps courbe de dimension 4 autour de cette étoile.
Une courbe est une géodésique si un vecteur tangent en un point quelconque de la courbe est égal au transport parallèle du vecteur tangent au point pris comme origine.
Tenseur de courbure
[modifier | modifier le code]Le tenseur de courbure de Riemann permet de déterminer, mathématiquement, quelle est la courbure en n'importe quel point de l'espace. La contraction du tenseur de Riemann produit deux objets mathématiques supplémentaires. Nous avons donc :
- Le tenseur de courbure de Riemann . C'est lui qui donne le plus d'informations sur la courbure de l'espace. Il est déterminé à partir des dérivées du tenseur métrique. Dans un espace plat, ce tenseur est nul.
- Le tenseur de Ricci . Il provient du besoin, dans la théorie d'Einstein, d'un tenseur de courbure ayant seulement 2 indices. Il est obtenu en faisant la moyenne de certaines portions du tenseur de Riemann.
- La courbure scalaire . Elle est une simple mesure de la courbure. Elle attribue une valeur scalaire en chaque point de l'espace. Elle est obtenue en calculant la trace du tenseur de Ricci.



Le tenseur de courbure de Riemann peut s'exprimer en termes de dérivées covariantes.
Le tenseur d'Einstein est un tenseur de rang 2 défini sur les variétés pseudo-riemanniennes. Il est défini par :


où est le tenseur de Ricci, est le tenseur métrique, est la constante cosmologique, et est la courbure scalaire. Le tenseur d'Einstein est utilisé dans les équations de champ d'Einstein.



Tenseur énergie-impulsion
[modifier | modifier le code]
Le tenseur énergie-impulsion est un outil mathématique de la physique qui décrit la densité et le flux d'énergie et d'impulsion dans l'espace-temps, généralisant le tenseur des contraintes de la physique newtonienne. C'est un attribut de la matière, du rayonnement et des champs de force non gravitationnels. Le tenseur énergie-impulsion est la source du champ gravitationnel dans les équations de champ d'Einstein de la relativité générale, tout comme la densité de masse est la source du champ gravitationnel dans la physique newtonienne. Parce que le tenseur énergie-impulsion a 2 indices (voir section suivante), le tenseur de courbure de Riemann doit être contracté pour obtenir le tenseur de Ricci, ayant lui aussi 2 indices, avant d'être utilisé dans l'équation d'Einstein.
Équation d'Einstein
[modifier | modifier le code]L'équations de champ d'Einstein (ou équation d'Einstein) est en réalité un ensemble de 10 équations de la théorie de la relativité générale qui décrivent l'interaction fondamentale de la gravitation résultant de la courbure de l'espace-temps par la matière et l'énergie[3]. Publié pour la première fois par Einstein en 1915[4] sous forme d'une équation tensorielle, l'équation d'Einstein assimile la courbure de l'espace-temps local, exprimée par le tenseur d'Einstein, à l'énergie et à l'impulsion locales dans cet espace-temps, exprimées par le tenseur énergie-impulsion[5].
L'équation de champ d'Einstein peut être écrite sous sa forme tensorielle comme :

où est le tenseur d'Einstein, est le tenseur énergie-impulsion et est la constante de gravitation.


Ceci signifie que la courbure de l'espace (représentée par le tenseur d'Einstein) est directement liée à la présence de matière et d'énergie en cet endroit de l'espace (représentée par le tenseur énergie-impulsion).
Solution de Schwarzschild et trous noirs
[modifier | modifier le code]Dans la théorie de la relativité générale d'Einstein, la métrique de Schwarzschild, est une solution de l'équation de champ d'Einstein qui décrit le champ gravitationnel à l'extérieur d'une masse sphérique, en supposant que la masse n'a pas de charge électrique, qu'elle n'a pas de moment cinétique et que la constante cosmologique est nulle. La solution est une approximation utile pour décrire des objets astronomiques à rotation lente tels que de nombreuses étoiles et planètes, y compris la Terre et le Soleil. La solution porte le nom de Karl Schwarzschild, qui l'a publié pour la première fois en 1916, juste avant sa mort.
D'après le théorème de Birkhoff, la métrique de Schwarzschild est la solution la plus générale, pour une symétrie sphérique et dans le vide, de l'équation de champ d'Einstein. Un trou noir de Schwarzschild ou trou noir statique est un trou noir sans charge ni moment cinétique. Un trou noir de Schwarzschild est décrit par la métrique de Schwarzschild et ne peut être distingué d'un autre trou noir de Schwarzschild que par sa masse.
Notes et références
[modifier | modifier le code]- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Introduction to the mathematics of general relativity » (voir la liste des auteurs).
Notes
[modifier | modifier le code]- Du latin « vectus », participe parfait du verbe « vehere », qui signifie « porter ». Pour un développement historique du mot « vecteur », voir Jeff Miller, « Earliest Known Uses of Some of the Words of Mathematics » (consulté le )
- Cette caractérisation n'est pas universelle : les deux arcs entre deux points situés sur un grand cercle d'une sphère sont tous deux des géodésiques.
Références
[modifier | modifier le code]- « Einstein Summation », Wolfram Mathworld (consulté le )
- Michael V. Berry, Principles of Cosmology and Gravitation, CRC Press, (ISBN 0-85274-037-9, lire en ligne), p. 58
- Einstein, « The Foundation of the General Theory of Relativity », Annalen der Physik, vol. 354, no 7, , p. 769 (DOI 10.1002/andp.19163540702, Bibcode 1916AnP...354..769E, lire en ligne [archive du ] [PDF])
- Einstein, « Die Feldgleichungen der Gravitation », Sitzungsberichte der Preussischen Akademie der Wissenschaften zu Berlin, , p. 844–847 (lire en ligne, consulté le )
- Charles W. Misner, Kip S. Thorne et John Archibald Wheeler, Gravitation, San Francisco, W. H. Freeman, (ISBN 978-0-7167-0344-0) Chapter 34, p 916
Voir aussi
[modifier | modifier le code]Bibliographie
[modifier | modifier le code]- P. A. M. Dirac, General Theory of Relativity, Princeton University Press, (ISBN 0-691-01146-X)
- Misner, Charles, Thorne, Kip S. et Wheeler, John Archibald, Gravitation, San Francisco, W. H. Freeman, (ISBN 0-7167-0344-0)
- Landau, L. D. et Lifshitz, E. M., Classical Theory of Fields, Oxford, Fourth Revised English, (ISBN 0-08-018176-7)
- R. P. Feynman, F. B. Moringo et W. G. Wagner, Feynman Lectures on Gravitation, Addison-Wesley, (ISBN 0-201-62734-5, lire en ligne
 )
) - Einstein, A., Relativity: The Special and General Theory, New York, Crown, (ISBN 0-517-02961-8, lire en ligne )