Eksa konvensiyalari
Balistika va parvoz dinamikasida eksa konventsiyalari mos yozuvlar ramkasi sifatida foydalanish uchun koordinata o'qlarining joylashishi va yo'nalishini o'rnatishning standartlashtirilgan usullaridir. Mobil obyektlar odatda qattiq deb hisoblangan tashqi ramkadan kuzatiladi. Boshqa obyektlarning nisbiy pozitsiyalari bilan ishlash uchun ushbu mobil obyektlarda boshqa ramkalar belgilanishi mumkin. Nihoyat, munosabat yoki yo'nalish tashqi ramka va mobil obyekt ustida belgilangan munosabatlar o'rtasidagi munosabat bilan tavsiflanishi mumkin.Avtomobilning yo'nalishi odatda munosabat deb ataladi. Bu odatda tanada o'rnatilgan ramkaning sobit mos yozuvlar ramkasiga nisbatan yo'nalishi bilan tavsiflanadi. Munosabatlar munosabat koordinatalari bilan tavsiflanadi va kamida uchta koordinatadan iborat.

Jahon ma'lumotnomalari: ENU va NED
[tahrir | manbasini tahrirlash]Asosan, laboratoriya ramkasi yoki mos yozuvlar ramkasi sifatida, ramkalar uchun ikki xil konventsiya mavjud:
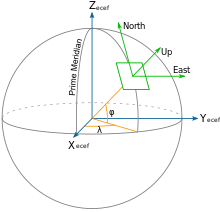
- Sharq, Shimoliy, Yuqori (ENU), geografiyada ishlatiladi.
- Shimoliy, Sharqiy, Pastga (NED), aerokosmik sohalarda maxsus foydalaniladi.
Ushbu ramka wrt Global mos yozuvlar ramkalari, masalan, Earth Center Earth Fixed (ECEF) inertial bo'lmagan tizim.
Munosabat tavsifi uchun jahon ma'lumotnomalari
[tahrir | manbasini tahrirlash]Munosabatlarni tavsiflash uchun standart konventsiyani o'rnatish uchun kamida mos yozuvlar tizimining o'qlarini va qattiq korpus yoki transport vositasining o'qlarini o'rnatish talab qilinadi. Noaniq belgilar tizimidan foydalanilganda (masalan, Eyler burchaklari) ishlatiladigan konventsiya ham ko'rsatilishi kerak. Shunga qaramay, eng ko'p ishlatiladigan yozuvlar (matritsalar va kvaternionlar) bir ma'noga ega.
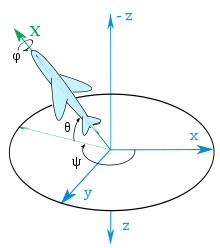
Tait-Bryan burchaklari ko'pincha avtomobilning tanlangan mos yozuvlar ramkasiga bo'lgan munosabatini tavsiflash uchun ishlatiladi.Ammo boshqa har qanday belgidan foydalanish mumkin. Avtotransportdagi musbat x o'qi har doim harakat yo'nalishini ko'rsatadi. Musbat y - va z - o'qi uchun biz ikkita turli konventsiyaga duch kelishimiz kerak:
- ENU tizimidan (Sharq-Shimoldan yuqoriga) tashqi mos yozuvlar sifatida (Jahon ramkasi) foydalanadigan avtomobillar, tanklar va boshqalar kabi quruqlikdagi transport vositalarida avtomobil (kuzov) musbat y - yoki qadam o'qi har doim uning chap tomoniga ishora qiladi va musbat z - yoki egilish o'qi har doim yuqoriga ishora qiladi. Dunyo ramkasining kelib chiqishi avtomobilning og'irlik markazida o'rnatiladi.
- Aksincha, NED tizimidan (Shimoliy-Sharq-pastga) tashqi ma'lumot sifatida (Jahon ramkasi) foydalanadigan suv osti kemalari, kemalar, samolyotlar va boshqalar kabi havo va dengiz transport vositalarida avtomobil (kuzov) musbat y - yoki pitch. eksa har doim uning o'ng tomoniga ishora qiladi va uning musbat z - yoki egilish o'qi doimo pastga ishora qiladi. Dunyo ramkasining kelib chiqishi avtomobilning og'irlik markazida o'rnatiladi.
- Va nihoyat, kosmik kemalar va boshqalar kabi kosmik transport vositalarida oxirgi konventsiyaning modifikatsiyasi qoʻllanadi, bunda transport vositasining (kuzovning) musbat y - yoki qadam o'qi yana har doim uning o'ng tomoniga ishora qiladi va uning musbat z yoki egilish o'qi har doim pastga ishora qiladi, lekin “pastga” endi ikki xil ma’noga ega boʻlishi mumkin: Agar tashqi mos yozuvlar sifatida mahalliy ramka deb ataladigan boʻlsa, uning musbat z oʻqi avvalgisi kabi “pastga” erning markaziga ishora qiladi. NED tizimi zikr qilingan,[1], lekin inertial ramka mos yozuvlar sifatida ishlatilsa, uning musbat z o'qi hozir Shimoliy samoviy qutbga, musbat x o'qi esa Vernal tengkunlik nuqtasiga[2] yoki boshqa mos yozuvlar meridianiga ishora qiladi..
Avtomobillarga o'rnatilgan ramkalar
[tahrir | manbasini tahrirlash]Ayniqsa, samolyotlar uchun bu ramkalar yuqoridan pastga chiziqdagi erga ulangan ramkalar bilan kelishish shart emas. Bu kontekstda ENU va NED nimani anglatishini kelishib olish kerak.
Quruqlikdagi transport vositalari uchun konventsiyalar
[tahrir | manbasini tahrirlash]
Quruqlikdagi transport vositalari uchun ularning to'liq yo'nalishini tasvirlash kamdan-kam uchraydi.Elektron barqarorlikni nazorat qilish yoki sun'iy yo'ldosh navigatsiyasi haqida gap ketganda. Bunday holda, konventsiya odatda qo'shni chizmalardan biridir, bu yerda RPY roll-pitch-yaw degan ma'noni anglatadi.
Dengiz transporti uchun konventsiyalar
[tahrir | manbasini tahrirlash]
Samolyotlar singari, xuddi shu atama kemalar va qayiqlarning harakati uchun ham qoʻllanadi. Ko'pincha ishlatiladigan ba'zi so'zlar dengiz navigatsiyasida kiritilgan. Masalan, egilish burchagi yoki yo'nalishi dengizdan kelib chiqqan bo'lib, "kursdan egilish" ma'nosini anglatadi. Etimologik jihatdan u "ketish" fe'li bilan bog'liq. Bu rulman tushunchasi bilan bog'liq. Odatda ψ qisqartmasi belgilanadi.[3]
Samolyotlarning mahalliy mos yozuvlar ramkalari uchun konventsiyalar
[tahrir | manbasini tahrirlash]
Andoza:Roll pitch yaw mnemonic.svgSamolyotning harakatini tavsiflovchi koordinatalar (sarlavha, balandlik va qirg'oq) odatda boshqaruv minorasida joylashgan mos yozuvlar boshqaruv tizimiga va shuning uchun ENU boshqaruv minorasining yer yuzasidagi holatiga nisbatan beriladi.Samolyotdan olib borilgan kuzatishlarni tavsiflash uchun koordinatalar odatda uning ichki o'qlariga nisbatan beriladi, lekin odatda qiziqarli nuqtalar joylashgan pastga yo'naltirilgan koordinata ijobiy sifatida ishlatiladi. Shuning uchun ular odatda NED hisoblanadi.
{kind=link}
Kosmik navigatsiya uchun ramkalar
[tahrir | manbasini tahrirlash]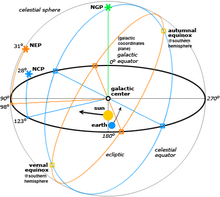
Yer atrofida aylanadigan sun'iy yo'ldoshlar uchun Ekvatorial koordinatalar tizimidan foydalanish odatiy holdir. Yer ekvatorining samoviy sferaga proyeksiyasi samoviy ekvator deb ataladi. Xuddi shunday, Yerning shimoliy va janubiy geografik qutblarining proyeksiyalari mos ravishda shimoliy va janubiy osmon qutblariga aylanadi.
Chuqur kosmik sun'iy yo'ldoshlar boshqa Osmon koordinata tizimidan foydalanadi, masalan, Ekliptik koordinatalar tizimi.
Munosabatlarni tasvirlash uchun ishlatiladigan ramkalar
[tahrir | manbasini tahrirlash]Odatda transport vositasining mahalliy kuzatuvlarini tasvirlash uchun ishlatiladigan ramkalar uning yerdagi kuzatuv stantsiyalariga nisbatan munosabatini tasvirlash uchun ishlatiladigan ramkalardir. ya'ni agar kuzatuv stantsiyasida ENU ramkasi ishlatilsa, ENU ramkalari ham bortda ishlatiladi va bu kadrlar mahalliy kuzatuvlarga murojaat qilish uchun ham ishlatiladi.
Bu qo'llanilmaydigan muhim holat - bu samolyot. Samolyot kuzatuvlari pastga qarab amalga oshiriladi va shuning uchun odatda NED o'qlari konventsiyasi qoʻllanadi. Shunga qaramay, yerosti stansiyalariga nisbatan munosabat berilganda, mahalliy yerga ulangan ramka va bortdagi ENU ramkasi o'rtasidagi munosabatdan foydalaniladi.
Yana qarang
[tahrir | manbasini tahrirlash]- Harakat dinamikasi va nazorati (kosmik kema)
- Eylerning aylanish teoremasi
- Giroskop
- Triada usuli
- Uch o'lchovda aylanish formalizmi
- Geografik koordinatalar tizimi
- Astronomik koordinata tizimlari
Manbalar
[tahrir | manbasini tahrirlash]- ↑ Exploration: Local Reference Orbiter Attitude (September 18, 1995) „Archived copy“. 2007-yil 14-iyulda asl nusxadan arxivlangan. Qaraldi: 2010-yil 8-oktyabr. (article no more available since 2007)
- ↑ Exploration: Inertial Reference Orbiter Attitude (October 3, 1995) „Archived copy“. 2007-yil 14-iyulda asl nusxadan arxivlangan. Qaraldi: 2010-yil 8-oktyabr. (article no more available since 2007)
- ↑ Hurt, H. H., Jr.. Aerodynamics for Naval Aviators. U.S. Government Printing Office, Washington D.C.: U.S. Navy, Aviation Training Division [1960], January 1965 — 284-bet. NAVWEPS 00-80T-80.