עוצמתיחות
 | |
| מידע כללי | |
|---|---|
| סוג |
תכונה של חומר |

עוצמתיחות, טנסגריטי, שלמות מתוחה או דחיסה צפה היא עיקרון מבני המבוסס על מערכת של רכיבים מבודדים הנתונים בדחיסה בתוך רשת של מתיחות רציפה, המסודרים בצורה כזו שהחלקים הדחוסים (בדרך כלל מוטות או סמוכות) אינם נוגעים אחד בשני, בעוד שהחלקים המתחברים המותחים (בדרך כלל כבלים או גידים) מקבעים את המערכת במרחב.
מבני טנסגריטי נמצאים הן בטבע והן באובייקטים מעשה ידי אדם: בגוף האנושי, העצמות מוחזקות בדחיסה בעוד שהגידים מחזיקים אותן במתיחה, והעקרונות הללו מיושמים גם בעיצוב רהיטים, אדריכלות ועוד.
המונח טנסגריטי הומצא על ידי באקמינסטר פולר בשנות ה-60 כהלחם של המילים האנגליות "שלמות" ו-"מתיחה".[1]
המהות העיקרית
[עריכת קוד מקור | עריכה]מבנה עוצמתיחות מתאפיין בכמה עקרונות בסיסיים המגדירים את תכונותיו הייחודיות:
- מתיחה רציפה: עקרון יסוד בעוצמתיחות, רכיבי המתיחה—בדרך כלל כבלים או גידים—יוצרים רשת רציפה המקיפה את כל המבנה. זה מאפשר הפצת לחצים מכניים באופן שווה ומחזיק את צורת המבנה, מה שתורם ליציבות ולגמישות של המערכת.
- דחיסה לא רציפה: רכיבי הדחיסה, כמו סמוכות או מוטות, נבדלים בכך שהם אינם נוגעים ישירות זה בזה אלא תלויים בתוך רשת המתיחה. זה מסיר את הצורך בחיבורים קשיחים, ומשפר את היעילות המבנית והעמידות של המערכת.
- מתוח לפני הרכבה: היבט חשוב במבני עוצמתיחות הוא מצבם המותח לפני הרכבתם, שבו רכיבי המתיחה נמתחים במהלך תהליך ההרכבה. המתיחה לפני הרכבה תורמת באופן משמעותי לקשיחות וליציבות של המבנה, ומבטיחה שכל הרכיבים יהיו או במתיחה או בדחיסה תמיד.
- איזון עצמי: מבני עוצמתיחות מאזנים את עצמם ומפיצים את הלחצים הפנימיים באופן אוטומטי לאורך המבנה. זה מאפשר להם להסתגל לעומסים משתנים מבלי לאבד את שלמות המבנה.
- מינימליזם ויעילות: מערכות עוצמתיחות מאמצות פילוסופיית עיצוב מינימליסטית, תוך שימוש בכמות מינימלית של חומרים להשגת עוצמה מבנית מרבית.
- הרחבה ומודולריות: עקרונות העיצוב של העוצמתיחות מאפשרים הרחבה ובנייה מודולרית. מבני עוצמתיחות יכולים להיות מותאמים או מורחבים בגודל ובמורכבות בהתאם לדרישות ספציפיות.
בשל הדפוסים הללו, אף רכיב מבני לא נתון למומנט כיפוף ואין לחץ גזירה בתוך המערכת. תכונה זו מאפשרת להפיק מבנים חזקים במיוחד ונוקשים עבור המסה שלהם ולחתך הרכיבים.
עקרונות אלה יחד מאפשרים למבני טנסגריטי להשיג איזון של כוח, עמידות וגמישות, מה שהופך את הרעיון ליישום רחב בתחומים כמו אדריכלות, רובוטיקה וביומכניקה.
דוגמה אדריכלית מוקדמת
[עריכת קוד מקור | עריכה]
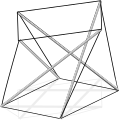
מבנה עוצמתיחות קונספטואלי הוקם בפסטיבל סקיילון ב-1951. הוא בנוי משישה כבלים, שלושה בכל קצה, המחזיקים את המגדל במקומו. שלושת הכבלים המחוברים לקצה התחתון "מגדירים" את מיקומו. שלושת הכבלים האחרים שומרים עליו אנכי.
עוצמתיחות בעלת שלושה מוטות (המוצג למעלה בהדמיה מסתובבת של פירמידת T3) נשענת על המבנה הפשוט הזה: הקצוות של כל מוט ירוק דומים לקצה העליון והתחתון של הסקיילון. כל עוד הזווית בין כל שני כבלים קטנה מ-180°, מיקום המוט מוגדר היטב. למרות ששלושה כבלים הם המינימום הדרוש ליציבות, ניתן לחבר כבלים נוספים לכל צומת לצורכי אסתטיקה ולעודפות. לדוגמה, מגדל ה־Needle Tower של סנלסון משתמש בדפוס חוזר הנבנה באמצעות צמתים המחוברים לחמישה כבלים כל אחד.
אלינור הארטני מציינת את השקיפות הוויזואליות כתכונה אסתטית חשובה של מבנים אלה.[2] Korkmaz et al. טוענים כי מבני עוצמתיחות קלים מתאימים לאדריכלות אדפטיבית.[3][4]
יישומים
[עריכת קוד מקור | עריכה]אדריכלות
[עריכת קוד מקור | עריכה]היישום של העוצמתיחות באדריכלות התפשט בשנות ה-60, כאשר Maciej Gintowt ו-Maciej Krasiński עיצבו את ה-Spodek בקטוביץ', פולין, כאחד מהמבנים הגדולים הראשונים שהשתמשו בעקרון העוצמתיחות. הגג מורכב ממשטח מישורי המוחזק על ידי מערכת כבלים שמחזיקים את היקפו. עקרונות עוצמתיחות שימשו גם בתכנון אולם ההתעמלות של דייוויד גייגר באולימפיאדת סיאול (1988), וב-Georgia Dome (אולימפיאדת אטלנטה 1996).
.jpg)
ב-4 באוקטובר 2009, נפתח גשר קורילפה בבריסביין שבאוסטרליה. מדובר במבנה כבלי-עמוד מרובה מבוסס עקרונות עוצמתיחות, והוא כיום הגשר העוצמתיחות הגדול בעולם.
רובוטיקה
[עריכת קוד מקור | עריכה]
מאז תחילת שנות ה-2000, עוצמתיחות משכה את תשומת הלב של רובוטיקאים בשל הפוטנציאל שלהן לעצב רובוטים קלים ועמידים. מחקרים רבים חקרו רובוטים מסוג "רובוטי עוצמתיחות",[5] רובוטים ביומימטיים,[6][7][8] ורובוטים רכים מודולריים.[9] רובוט העוצמתיחות המפורסם ביותר הוא ה-סופר בול בוט,[10] רובוט למטרות חקר חלל באמצעות מבנה עוצמתיחות של 6 קשתות, הנמצא בפיתוח ב-NASA Ames.
אנטומיה
[עריכת קוד מקור | עריכה]ביועוצמתיחות, מונח שהמציא סטפן לוין, הוא יישום תאורטי מורחב של עקרונות הטנסגריטי למבנים ביולוגיים.[11] מבנים ביולוגיים כגון שרירים, עצמות, חיתולית, רצועות וגידים, או ממברנות תאים נוקשות וגמישות, מתחזקים על ידי שילוב בין חלקים מתוחים ובלתי מכווצים. מערכת השרירים-שלד האנושית מורכבת מרשת רציפה של שרירים ורקמות חיבור,[12] בעוד שהעצמות מספקות תמיכה דחיסתית בלתי רציפה, ומערכת העצבים שומרת על מתח במהלך החיים באמצעות גירוי חשמלי. לוין טוען כי עמוד השדרה האנושי, הוא גם מבנה עוצמתיחות אף שאין תמיכה לתיאוריה זו מבחינה מבנית.[13]
ביוכימיה
[עריכת קוד מקור | עריכה]דונלד אי. אינגבר פיתח תיאוריה של עוצמתיחות כדי לתאר תופעות רבות שנצפו בביולוגיה מולקולרית.[14] לדוגמה, הצורות המופיעות בתאים, בין אם זו תגובתם ללחץ המופעל, אינטראקציות מולקולריות בין פיברילין ואקטין, או חלוקה לשניים של DNA קשורה לשילוב של מתח-מתח פנימי. אינגבר טוען כי העוצמתיחות שולטת במרבית התהליכים הפיזיולוגיים בגוף, ורקמות רבות ומערכות חיות, כולל התפקוד המולקולרי, התגובה ללחץ ועוד.[15][16]
פטנטים
[עריכת קוד מקור | עריכה]- "מבנים בעלי שלמות מתיחה", 13 בנובמבר 1962, באקמינסטר פולר.
- פטנט צרפתי מס' 1,377,290, "בניית רשתות אוטוטנדנטיות", 28 בספטמבר 1964, דוד ג'ורג' אמריך.
- פטנט צרפתי מס' 1,377,291, "מבנים ליניאריים אוטוטנדנטיים", 28 בספטמבר 1964, דוד ג'ורג' אמריך.
- "בניית תלייה" (המכונה גם אספנשן), 7 ביולי 1964, באקמינסטר פולר.
- "מבנה עם מתיחה רציפה, דחיסה לא רציפה," 16 בפברואר 1965, קנת' סלסון.
- "מבנים בעלי שלמות מתיחה לא סימטרית," 18 בפברואר 1975, באקמינסטר פולר.
מבני עוצמתיחות בסיסיים
[עריכת קוד מקור | עריכה]-
 המבנה הפשוט ביותר של עוצמתיחות, פְּרִיזְמָה בת 3 קודקודים
המבנה הפשוט ביותר של עוצמתיחות, פְּרִיזְמָה בת 3 קודקודים -
 פְּרִיזְמָה נוספת בת 3 קודקודים
פְּרִיזְמָה נוספת בת 3 קודקודים -
 מבנה דומה אך עם ארבעה רכיבי דחיסה
מבנה דומה אך עם ארבעה רכיבי דחיסה -
![פרוטו-טנסגריטי פריזמה מאת קרל יוהנסון, 1921[17]](//upload.wikimedia.org/wikipedia/commons/thumb/6/6b/Proto-Tensegrity_by_Ioganson.jpg/120px-Proto-Tensegrity_by_Ioganson.jpg) פרוטו-טנסגריטי פריזמה מאת קרל יוהנסון, 1921[17]
פרוטו-טנסגריטי פריזמה מאת קרל יוהנסון, 1921[17] -
![עוצמתיחות טטרהדרון, פרנצ'סקו דלה סאלה, 1952[18]](//upload.wikimedia.org/wikipedia/commons/thumb/a/af/Tensegrity_Tetrahedron.png/120px-Tensegrity_Tetrahedron.png) עוצמתיחות טטרהדרון, פרנצ'סקו דלה סאלה, 1952[18]
עוצמתיחות טטרהדרון, פרנצ'סקו דלה סאלה, 1952[18] -
![עוצמתיחות טטרהדרון מודול X, קנת' סלסון, 1959[19]](//upload.wikimedia.org/wikipedia/commons/thumb/0/07/Tensegrity_X-Module_Tetrahedron.png/120px-Tensegrity_X-Module_Tetrahedron.png) עוצמתיחות טטרהדרון מודול X, קנת' סלסון, 1959[19]
עוצמתיחות טטרהדרון מודול X, קנת' סלסון, 1959[19]



![פרוטו-טנסגריטי פריזמה מאת קרל יוהנסון, 1921[17]](/wiki/%D7%A7%D7%95%D7%91%D7%A5:Proto-Tensegrity_by_Ioganson.jpg)
![עוצמתיחות טטרהדרון, פרנצ'סקו דלה סאלה, 1952[18]](/wiki/%D7%A7%D7%95%D7%91%D7%A5:Tensegrity_Tetrahedron.png)
![עוצמתיחות טטרהדרון מודול X, קנת' סלסון, 1959[19]](/wiki/%D7%A7%D7%95%D7%91%D7%A5:Tensegrity_X-Module_Tetrahedron.png)
מבני עוצמתיחות
[עריכת קוד מקור | עריכה]-
 פסל האמנות "מגדל מחט" מאת קנת' סלסון.
פסל האמנות "מגדל מחט" מאת קנת' סלסון. -
 כיפת עוצמתיחות עשויה ממסמרות גן ופי.וי.סי, נבנתה בחצר בית בשנת 2009
כיפת עוצמתיחות עשויה ממסמרות גן ופי.וי.סי, נבנתה בחצר בית בשנת 2009 -

-
 Dissipate, מגדל בצורת שעון חול הכולל מבנה עוצמתיחות, נבנה ב־AfrikaBurn, 2015, אירוע אזורי של פסטיבל ברנינג מן
Dissipate, מגדל בצורת שעון חול הכולל מבנה עוצמתיחות, נבנה ב־AfrikaBurn, 2015, אירוע אזורי של פסטיבל ברנינג מן



ראו גם
[עריכת קוד מקור | עריכה]לקריאה נוספת
[עריכת קוד מקור | עריכה]- Fuller, R. Buckminster (1961). "Tensegrity". Portfolio and Art News Annual (4): 112–127, 144, 148.
- — (1982) [1975]. Synergetics: Explorations in the Geometry of Thinking. Vol. I. Macmillan. ISBN 978-0-02-065320-2.
- — (1983) [1979]. Synergetics 2: Further Explorations in the Geometry of Thinking. Vol. 2. Macmillan. ISBN 978-0-02-092640-5. Online
- —; Marks, Robert W. (1973) [1960]. The Dymaxion World of Buckminster Fuller. Anchor Books. Figs. 261–280. ISBN 978-0-385-01804-3. סקירה טובה על היקף הטנסגריטי מנקודת מבטו של פולר, וסקירה מעניינת של מבנים מוקדמים עם ייחוסים מדויקים ברובם.
- Kenner, Hugh (1976). Geodesic Math and How to Use It. University of California Press. ISBN 978-0-520-02924-8. הדפסה מחודשת מ-2003 ISBN 0520239318. מקום מצוין להתחיל בו ללמוד על המתמטיקה של טנסגריטי ובניית מודלים.
- Gómez-Jáuregui, Valentin (2007). Tensegridad. Estructuras Tensegríticas en Ciencia y Arte (בספרדית). Santander: Universidad de Cantabria. ISBN 978-84-8102-437-1.
- — (2010). Tensegrity Structures and their Application to Architecture. Santander: Servicio de Publicaciones de la Universidad de Cantabria. ISBN 978-84-8102-575-0.
- Gough, Maria (Spring 1998). "In the Laboratory of Constructivism: Karl Ioganson's Cold Structures". October. 84: 90–117. doi:10.2307/779210. JSTOR 779210.
- Juan, S. J.; Tur, J M (ביולי 2008). "Tensegrity frameworks: Static analysis review". Mechanism and Machine Theory. 43 (7): 859–81. CiteSeerX 10.1.1.574.7510. doi:10.1016/j.mechmachtheory.2007.06.010.
{{cite journal}}: (עזרה) - Korkmaz, Sinan; Bel Hadj Ali, Nizar; Smith, Ian F.C. (ביוני 2011). "Determining Control Strategies for Damage Tolerance of an Active Tensegrity Structure" (PDF). Engineering Structures. 33 (6): 1930–1939. Bibcode:2011EngSt..33.1930K. CiteSeerX 10.1.1.370.6243. doi:10.1016/j.engstruct.2011.02.031. אורכב מ-המקור (PDF) ב-29 בספטמבר 2011.
{{cite journal}}: (עזרה) - —; —; — (בינואר 2012). "Configuration of Control System for Damage Tolerance of a Tensegrity Bridge". Advanced Engineering Informatics. 26 (1): 145–155. doi:10.1016/j.aei.2011.10.002.
{{cite journal}}: (עזרה) - Lalvani, Haresh, ed. (1996). "Origins of Tensegrity: Views of Emmerich, Fuller and Snelson". International Journal of Space Structures. 11 (1–2): 27–55. doi:10.1177/026635119601-204. S2CID 114004009.
- Souza, Thales R.; Fonseca, Sérgio T.; Gonçalves, Gabriela G.; Ocarino, Juliana M.; Mancini, Marisa C. (באוקטובר 2009). "Prestress revealed by passive co-tension at the ankle joint". Journal of Biomechanics. 42 (14): 2374–80. doi:10.1016/j.jbiomech.2009.06.033. PMID 19647832.
{{cite journal}}: (עזרה) - Edmondson, Amy (2007). "A Fuller Explanation", Emergent World LLC
- Forbes, Peter (2010) [2006]. "9. The Push and Pull Building System". The Gecko's Foot: How Scientists are Taking a Leaf from Nature's Book. Harper Collins. pp. 197–230. ISBN 978-0-00-740547-3.
- Hanaor, Ariel (1997). "13. Tensegrity: Theory and Application". In Gabriel, J. François (ed.). Beyond the Cube: The Architecture of Space Frames and Polyhedra. Wiley. pp. 385–408. ISBN 978-0-471-12261-6.
- Masic, Milenko; Skelton, Robert E.; Gill, Philip E. (באוגוסט 2005). "Algebraic tensegrity form-finding". International Journal of Solids and Structures. 42 (16–17): 4833–4858. doi:10.1016/j.ijsolstr.2005.01.014.
{{cite journal}}: (עזרה) הצגת התוצאה המדהימה שכל טרנספורמציה ליניארית של טנסגריטי היא גם טנסגריטי.
קישורים חיצוניים
[עריכת קוד מקור | עריכה]הערות שוליים
[עריכת קוד מקור | עריכה]- ^ Swanson, RL (2013). "Biotensegrity: a unifying theory of biological architecture with applications to osteopathic practice, education, and research-a review and analysis". The Journal of the American Osteopathic Association. 113 (1): 34–52. doi:10.7556/jaoa.2013.113.1.34. PMID 23329804.
- ^ Hartley, Eleanor (19 בפברואר – 21 במרץ 2009), "Ken Snelson and the Aesthetics of Structure", Kenneth Snelson: Selected Work: 1948–2009 (exhibition catalogue), Marlborough Gallery
{{citation}}: (עזרה)תחזוקה - ציטוט: date format (link) - ^ Korkmaz, Bel Hadj Ali & Smith 2011
- ^ Korkmaz, Bel Hadj Ali & Smith 2012
- ^ Sabelhaus, Andrew P.; Bruce, Jonathan; Caluwaerts, Ken; Manovi, Pavlo; Firoozi, Roya Fallah; Dobi, Sarah; Agogino, Alice M.; SunSpiral, Vytas (במאי 2015). "System design and locomotion of SUPERball, an untethered tensegrity robot". 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE. pp. 2867–2873. doi:10.1109/ICRA.2015.7139590. hdl:2060/20160001750. ISBN 978-1-4799-6923-4. S2CID 8548412.
{{cite book}}: (עזרה) - ^ Lessard, Steven; Castro, Dennis; Asper, William; Chopra, Shaurya Deep; Baltaxe-Admony, Leya Breanna; Teodorescu, Mircea; SunSpiral, Vytas; Agogino, Adrian (באוקטובר 2016). "A bio-inspired tensegrity manipulator with multi-DOF, structurally compliant joints". 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. pp. 5515–5520. arXiv:1604.08667. doi:10.1109/iros.2016.7759811. ISBN 978-1-5090-3762-9. S2CID 4507700.
{{cite book}}: (עזרה) - ^ Zappetti, Davide; Arandes, Roc; Ajanic, Enrico; Floreano, Dario (2020-06-05). "Variable-stiffness tensegrity spine". Smart Materials and Structures. 29 (7): 075013. Bibcode:2020SMaS...29g5013Z. doi:10.1088/1361-665x/ab87e0. ISSN 0964-1726. S2CID 216237847.
- ^ Liu, Yixiang; Dai, Xiaolin; Wang, Zhe; Bi, Qing; Song, Rui; Zhao, Jie; Li, Yibin (2022). "A Tensegrity-Based Inchworm-Like Robot for Crawling in Pipes With Varying Diameters". IEEE Robotics and Automation Letters. 7 (4): 11553–11560. doi:10.1109/LRA.2022.3203585. ISSN 2377-3766. S2CID 252030788.
- ^ Zappetti, D.; Mintchev, S.; Shintake, J.; Floreano, D. (2017), "Bio-inspired Tensegrity Soft Modular Robots", Biomimetic and Biohybrid Systems, Cham: Springer International Publishing, pp. 497–508, arXiv:1703.10139, doi:10.1007/978-3-319-63537-8_42, ISBN 978-3-319-63536-1, S2CID 822747
- ^ Hall, Loura (2015-04-02). "Super Ball Bot". NASA. נבדק ב-2020-06-18.
- ^ Levin, Stephen (2015). "16. Tensegrity, The New Biomechanics". In Hutson, Michael; Ward, Adam (eds.). Oxford Textbook of Musculoskeletal Medicine. Oxford University Press. pp. 155–56, 158–60. ISBN 978-0-19-967410-7.
- ^ Souza et al. 2009.
- ^ Levin, Stephen M. (2002-09-01). "The tensegrity-truss as a model for spine mechanics: biotensegrity". Journal of Mechanics in Medicine and Biology. 02 (3n04): 375–88. doi:10.1142/S0219519402000472. ISSN 0219-5194.
- ^ Ingber, Donald E. (בינואר 1998). "The Architecture of Life" (PDF). Scientific American. 278 (1): 48–57. Bibcode:1998SciAm.278a..48I. doi:10.1038/scientificamerican0198-48. PMID 11536845. אורכב מ-המקור (PDF) ב-2005-05-15.
{{cite journal}}: (עזרה) - ^ Ingber 1998.
- ^ Ingber 2008.
- ^ Gómez-Jáuregui 2010, p. 28. Fig. 2.1
- ^ Fuller & Marks 1960, Fig. 268.
- ^ Lalvani 1996, p. 47