.jpg)
-
El descens del rover a la superfície del cràter Gale en alta definició (6 d'agost de 2012).
-
Lloc d'aterratge del Curiosity. Primer panorama de 360 graus en color fotografiat pel rover (10 d'agost de 2012).
Curiosity
| Aquest article tracta sobre el rover enviat a la superfície de Mart. Si cerqueu la missió espacial, vegeu «Mars Science Laboratory». |
| |||
| Informació general | |||
|---|---|---|---|
| Tipus | Mars rover | ||
| Fabricant | Jet Propulsion Laboratory | ||
| Pais d'origen | Estats Units d'Amèrica | ||
Operador | |||
| Ús | exploració de Mart | ||
| Llançament | |||
| Data | 26 novembre 2011 | ||
| Vehicle de llançament | Atlas V 541 | ||
|
| |||
| Descens | |||
| Data | 6 agost 2012 | ||
| Lloc | Bradbury Landing 4° 35′ 22″ S, 137° 26′ 30″ E / 4.5895°S,137.44169°E | ||
|
| |||
| Exploració | |||
| Data | 10 juny 2024 | ||
| Lloc | Gale 5° 22′ S, 137° 49′ E / 5.37°S,137.81°E | ||
| Distància coberta | 31.99 km | ||
| Durada | 4210 sols | ||
|
| |||
| Reentrada | 6 agost 2012 | ||
| Punt de sortida | Complex de llançament 41 | ||
| Especificacions | |||
| Massa | 899 kg | ||
Dimensions
| |||
| Llargada | 3 m | ||
| Alçada | 2,1 m | ||
| Amplada | 2,8 m | ||
|
| |||
Instruments Mastcam (en)
MAHLI (en) MARDI (en) Espectròmetre de rajos X de partícules alfa ChemCam (en) CheMin (en) Sample Analysis at Mars Radiation assessment detector DAN (en) REMS (en) | |||
El Curiosity és un rover que està explorant el cràter Gale a Mart, com a part de la missió Mars Science Laboratory (MSL) duta a terme per la NASA.
Va ser llançat des de Cap Canaveral el dia 26 de novembre del 2011, a les 16:02 CET a bord de la nau espacial MSL i va aterrar satisfactòriament a Aeolis Palus, al cràter Gale de Mart el 6 d'agost de 2012, a les 07:17 CET.[1] El punt d'aterratge del Curiosity (anomenat Bradbury Landing),[2] és a menys de 2,4 km del centre del punt d'aterratge fixat la NASA pel rover després d'un viatge de 563,000,000 km.[3]
Alguns dels objectius del rover Curiosity són obtenir informació del clima de Mart, de la seva geologia, investigar si la vida a Mart podria haver estat possible investigant l'rol de l'aigua i estudiant-ne l'habitabilitat planetària, i també preparar una possible futura exploració humana.[4][5]
Objectius
[modifica]
Tal com va establir el Mars Exploration Program, els objectius principals de la missió MSL són ajudar a determinar si a Mart hi podria haver hagut mai vida, així com determinar l'rol de l'aigua i estudiar el clima i la geologia del planeta.[4][5] Aquesta missió també ha de servir per a ajudar a preparar una futura exploració humana.[5]
Amb aquesta intenció, el Curiosity té vuit objectius científics principals:[4]
- Determinar la natura i fer un inventari dels compostos orgànics de Mart.
- Fer un inventari dels elements químics bàsics per a la vida (carboni, hidrogen, nitrogen, oxigen, fòsfor i sulfur)
- Identificar els trets que poden representar els efectes produïts per processos biològics (biosignatura).
- Investigar la composició química, isotòpica i mineral de la superfície marciana i dels materials geològics propers a la superfície.
- Interpretar els processos que han format i modificat les roques i el sòl (pedologia)
- Avaluar els processos evolutius de l'atmosfera marciana en una escala de temps llarga (i.e. 4.000.000.000 anys)
- Determinar l'estat present, la distribució i el cicle de l'aigua i del diòxid de carboni.
- Caracteritzar l'ampli espectre de radiacions a la superfície, incloent-hi la radiació galàctica, els raigs còsmics, les tempestes de protons i els neutrons secundaris.
Especificacions
[modifica]El rover Curiosity representava un 23% dels 3.893 kg que pesava la nau del Mars Science Laboratory, que tenia per única missió dur el rover des del llançament a la terra fins al moment de l'aterratge a Mart. La resta de parts del MSL es van anar desprenent de la nau durant el viatge.
- Dimensions: el Curiosity té una massa de 899 kg incloent-hi 80 kg d'instruments científics.[6] Fa 2,9 m de longitud per 2,7 m d'amplada i 2,2 m d'alçada.[7]

- Font d'energia: el Curiosity funciona amb energia provinent d'un generador termoelèctric per radioisòtops (RTG), igual que les sondes Viking 1 i Viking 2, que van ser enviades a Mart l'any 1976.[8]
- Els sistemes d'energia per radioisòtops son generadors que produeixen electricitat a partir de la descomposició natural del plutoni-238, que és un isòtop no físsil del plutoni. La calor generada per la descomposició natural d'aquest isòtop es converteix en electricitat utilitzant termoparells, que proveeixen el rover d'energia constant al llarg de totes les estacions de l'any i tant de dia com de nit. La calor residual es pot enviar a través de canonades a sistemes calents, alliberant energia elèctrica per al funcionament del vehicle i dels instruments.[8][9] L'RTG del Curiosity és alimentat per 4,8 kg de diòxid de plutoni-238 subministrat pel Departament d'Energia dels Estats Units,[10] empaquetat en 32 cubs, els quals tenen un volum aproximat de 20 cm³.[6]
- El generador d'energia del Curiosity és un RTG d'última generació construït per Boeing i Idaho National Laboratory anomenat Multi-Mission Radioisotope Thermoelectric Generator o MMRTG.[11][12] Basat en la tecnologia clàssica dels RTG, el MMRTG representa una etapa del desenvolupament més compacta i flexible,[11] i està dissenyat per produir a l'inici de la missió 125 vats d'energia elèctrica i 2.000 vats d'energia tèrmica.[8][9] La producció d'energia per part del MMRTG disminueix amb el temps conforme va disminuint la quantitat de plutoni. Està dissenyat per tenir una vida mínima de 14 anys i per produir 100 vats d'energia passats aquests 14 anys.[13][14] El MMRTG pot generar 9 MJ cada dia, que és molt més que l'energia que produïen els panells solars dels Mars Exploration Rovers, els quals podien generar aproximadament 2,1 MJ cada dia. Part de l'energia produïda pel MMRTG s'utilitza per a carregar dues bateries d'ió liti recarregables. Això permet que es puguin satisfer demandes d'energia puntuals del rover quan aquest necessita durant un temps més energia de la que pot produir el generador. Cada bateria té una capacitat de 42 amper-hora.
- Sistema de rebuig de calor: la temperatura al lloc d'aterratge de Mart pot anar dels +30 als -127 °C al llarg de l'any marcià, per això cal un sistema tèrmic que escalfi el rover. El sistema tèrmic pot aconseguir això de diferents maneres: passivament, a través de la dissipació de calor per part dels components interns; amb escalfadors elèctrics col·locats estratègicament en components clau, i utilitzant el sistema de rebuig de calor (HRS) del rover.[15] Aquest sistema utilitza un fluid bombejat a través de 60 m de canonades que recorren el cos del Curiosity de manera que els components més sensibles es mantenen a temperatures òptimes.[16] Aquest circuit també té la funció de rebutjar la calor quan el rover s'escalfa massa, i també pot captar la calor residual produïda pel generador, mitjançant el bombeig del fluid a través de dos intercanviadors de calor muntats al costat de l'RTG. L'HRS també és capaç de refredar els components del rover en cas de necessitat.[16]
- Ordinadors: el Curiosity porta dos ordinadors idèntics incorporats que s’anomenen Rover Computer Element (RCE). Aquests contenen memòries endurides contra la radiació per poder suportar les grans quantitats de radiació provinents de l'espai i per protegir-lo dels cicles d'apagada del rover. Cada memòria dels ordinadors inclou 256 kB d'EEPROM, 256 MB de DRAM i 2 GB de memòria flaix,[17] en comparació als 3 MB d'EEPROM, 128 MB de DRAM i 256 MB de memòria flaix que duien els Mars Exploration Rovers.[18]
- Els ordinadors RCE utilitzen una CPU RAD750, que és un successor del RAD6000 utilitzat en els Mars Exploration Rovers.[19] La CPU RAD750 té capacitat per a 400 MIPS, mentre que la RAD6000 tenia capacitat per a 35 MIPS.[20][21] Dels dos ordinadors, n’hi ha un que està configurat per funcionar de backup i en cas de problemes amb l'ordinador principal n'assumiria el seu rol.[17]
- El Curiosity té una unitat de mesura inercial (UMI) que proveeix al rover d'informació en 3 eixos i que utilitza com a eina de navegació.[17] Els ordinadors del rover estan en constant autocontrol per mantenir el rover en funcionament, per exemple regulant-ne la temperatura.[17] Accions com fer fotografies, conduir i fer servir els diferents instruments que té es realitzen seguint una seqüència de comandaments que és enviada des de l'equip de vol al rover.[17] El Curiosity va instal·lar tot el seu programari d'operacions en la superfície després d'aterrar a Mart perquè els ordinadors no tenien prou espai per a fer-ho durant el vol. El nou software va substituir totalment el software utilitzat durant el vol.[3]
- Comunicacions: el Curiosity està equipat amb un transmissor i receptor de bandes X que pot comunicar-se directament amb la Terra i una ràdio definida per software UHF Electra-Lite per a comunicar-se amb els orbitadors de Mart.[15] La comunicació amb els orbitadors és el camí principal que utilitza el rover per a enviar les dades recollides a la Terra, ja que aquests tenen més energia i antenes més llargues i això els permet realitzar transmissions d'informació més ràpides.[15] El rover també té dues ràdios UHF[15] que envien senyals al satèl·lit Mars Odyssey i aquest els envia a la Terra. De mitjana es necessiten 14 minuts i 6 segons per a enviar senyals de la Terra a Mart i viceversa.[22] El Curiosity es pot comunicar amb la Terra directament a una velocitat de fins a 32 kbit/s, però la major part de la transferència de dades la fa mitjançant els orbitadors Mars Reconnaissance Orbiter i Odyssey orbiter. La velocitat de transferència de dades entre el Curiosity i cada orbitador pot arribar als 2 Mbit/s i als 256 kbit/s respectivament, però cada orbitador només es pot comunicar amb el Curiosity durant 8 minuts cada dia.[23]
- El Jet Propulsion Laboratory (JPL) és el hub de distribució de dades central on els productes de dades seleccionats són proporcionats als diferents llocs d'operacions científiques, segons sigui necessari.[15] En aterrar, la telemetria es va monitorar mitjançant tres orbitadors, depenent de la seva localització dinàmica. Aquests orbitadors eren: el Mars Odyssey, el Mars Reconnaissance Orbiter i el satèl·lit de l'ESA Mars Express.[24]
- Sistemes de mobilitat: igual que els rovers de les missions prèvies Mars Exploration Rover i Mars Pathfinder, el Curiosity està equipat amb sis rodes de 50 cm de diàmetre muntades en una suspensió rocker-bogie. A diferència dels seus predecessors, el sistema de suspensió també va servir com a tren d'aterratge.[25][26] Cada roda té tacs, i s'activen i s'orienten de manera independent, proporcionant una millor adherència del rover quan escala terrenys de sorra tova i quan es mou per damunt de les pedres. Cada roda del davant i del darrere es pot adreçar independentment, permetent que el rover giri sobre si mateix i que pugui fer revolts arquejats.[15] Cada roda té un patró que ajuda a mantenir la tracció i deixa roderes amb marques sobre la superfície de Mart que després s’utilitzen per a mesurar la distància recorreguda gràcies a les càmeres de bord. El patró de les rodes és el codi Morse per a dir “JPL” (•--- •--• •-••).[27] El rover és capaç d'escalar dunes de sorra amb pendents de fins a 12,5 graus.[28] També pot suportar una inclinació d'almenys 50 graus en qualsevol direcció sense bolcar, però els sensors limiten automàticament el rover i no permeten que s'inclini més de 30 graus.[15]
- El Curiosity és capaç de superar obstacles de fins a 65 cm d'alçada.[29] Des de la seva base fins a terra hi ha una alçada de 60 cm.[30] La velocitat màxima de navegació automàtica s'estima que és d'uns 200 m per dia, depenent d'una sèrie de variables com ara els nivells d'energia, la dificultat del terreny, el lliscament i la visibilitat.[29] El rover va aterrar a aproximadament 10 km del peu de la Muntanya Sharp[31] i s'espera que recorri un mínim de 19 km durant els seus primers dos anys de missió.[32] Pot arribar a desplaçar-se a una velocitat de 90 m/h, però la seva velocitat mitjana és de 30 m/h.[32]
Instruments
[modifica]
L'estratègia general per a l'anàlisi de mostres consisteix a utilitzar càmeres d'alta resolució per a buscar trets destacables de Mart que siguin d'interès. Si una superfície en concret és interessant, el Curiosity pot evaporar-ne una petita part amb un làser d'infrarojos i examinar la signatura espectral resultant per esbrinar la composició elemental de la roca en qüestió. Si encara es manté l'interès per aquella superfície, el rover pot fer servir un microscopi i un espectròmetre de raigs X per a examinar-la de més a prop. El Curiosity també pot perforar roques i treure'n mostres en pols per analitzar amb dues caixes d'anàlisi d'alt espectre (SAM, de l'anglès Sample Analysis at Mars) que porta incorporades el mateix rover,[33] amb una capacitat màxima de 74 mostres.[34] Les càmeres MastCam, Mars Hand Lens Imager (MAHLI) i Mars Descent Imager (MARDI) van ser creades per l'empresa Malin Space Science Systems i comparteixen components, com ara un processador d'imatges electrònic, un sensor CCD de 1600x1200 i un filtre mosaic de Bayer.[35][36][37][38][39][40]
El Curiosity té un total de 17 càmeres: 8 HazCams, 4 Navcams, 2 MastCams, 1 MAHLI, 1 MARDI i 1 ChemCam.
Mast Camera (MastCam)
[modifica]El sistema MastCam ofereix la possibilitat de captar imatges amb múltiples espectres i color real gràcies a dues càmeres amb visió estereoscòpica (tridimensional).[36] Les càmeres poden obtenir imatges de color real de 1600x1200 píxels i vídeos de fins a 10 fotogrames per segon, en un format d'alta definició de 1280x720.
Una de les càmeres MastCam és la MAC (de l'anglès Medium Angle Camera), que té una distància focal de 34 mm i un camp de visió de 15 graus. L'altra càmera MastCam és la NAC (de l'anglès Narrow Angle Camera), que té una distància focal de 100 mm i un camp de visió de 5,1 graus.[36] L'empresa Malin també va dissenyar dues Mastcams amb zoom,[41] però no es van fer servir per al Curiosity perquè no hi havia prou temps per a provar el nou maquinari, ja que s'aproximava la data de llançament.[42]
Cada càmera té 8 GB de memòria flaix, les quals poden emmagatzemar més de 5.500 imatges RAW i pot fer servir l'algorisme de compressió sense pèrdua a temps real.[36] Les càmeres tenen la capacitat d'enfocar automàticament i això permet que se centrin en objectes des de 2,1 m fins a l'infinit.[39] A més del filtre mosaic de Bayer que té cada càmera, també tenen una roda de filtres de vuit posicions. Mentre que el filtre mosaic de Bayer redueix el rendiment de la llum visible, els tres colors són pràcticament transparents amb longituds d'ona més llargues de 700 nm i, per tant, tenen un efecte mínim en les observacions infrarojes.[36]
Chemistry and Camera instrument (ChemCam)
[modifica]La ChemCam està formada per una combinació d'instruments que en formen un de sol: un sistema d'espectroscòpia de plasma induïda per làser (LIBS, de l'anglès Laser-induced breakdown spectroscopy),una càmera coneguda com a Remote Micro Imager (RMI) i un telescopi.[43] El propòsit del LIBS és proporcionar compostos elementals de roca i sòl, mentre que la RMI donarà als científics que treballen amb la ChemCam imatges d'alta resolució de les zones de mostreig de les roques i el sòl que estudia el LIBS.[44] El LIBS pot apuntar a una roca o a una mostra de sòl que estigui fins a 7 m de distància i vaporitzar-ne una petita fracció i observar després l'espectre de llum emès per la mostra vaporitzada. Per a vaporitzar una mostra utilitza fins a 75 microimpulsos de 5 nanosegons amb un làser de llum infraroja i una longitud d'ona de 1067 nm.[43][45] Els espectròmetres de la ChemCam tenen la capacitat de detectar fins a 6.144 longituds d'ona diferents de llum ultraviolada, visible i infraroja.[46] L'equip de la ChemCam espera analitzar dotze mostres de roques marcianes al dia.[43]
La resolució de l'RMI permet que fotografiï objectes de fins a 1 mm que estiguin a 10 m de distància, i a aquesta distància té un camp de visió de 20 cm.[44] El conjunt d'instruments ChemCam va ser dissenyat pel Laboratori Nacional Los Alamos i pel laboratori francès CESR.[44][47][48]
Càmeres de navegació (Navcams)
[modifica]

El Curiosity té dos parells de càmeres de navegació en blanc i negre muntades al pal del rover que l'ajuden en la navegació.[49][50] Les càmeres tenen un angle de visió de 45 graus i utilitzen llum visible per a obtenir imatges estereogràfiques en 3D.[50][51] Aquestes càmeres utilitzen el format de compressió d'imatge ICER, tal com ja succeïa amb les càmeres utilitzades en les missions Mars Pathfinder.
Rover Environmental Monitoring Station (REMS)
[modifica]El REMS és una estació meteorològica que duu el Curiosity a bord i que li permet mesurar la humitat, la pressió, la temperatura, la velocitat i direcció del vent, i la radiació ultraviolada.[52] Aquesta tecnologia és d'aportació espanyola en col·laboració amb l'Institut Meteorològic Finès. L'equip d'investigació espanyol va ser liderat per Javier Gómez-Elvira del Centro d'Astrobiología de Madrid.[53][54] L'estació incorpora un sensor de vent que conté un xip de silici que va ser dissenyat i fabricat per investigadors de la UPC. Per mesurar el vent el sensor es basa en un principi físic conegut com a anemometria de fil calent.[55]
El REMS està format per quatre components principals: el boom1, que té un sensor de vent, un de temperatura terrestre i un de temperatura de l'aire; el boom2, que incorpora un sensor de vent, un d'humitat i un de temperatura de l'aire; el sensor de radiació ultraviolada i la unitat de control.[53] Els dos booms estan situats al pal del rover, el sensor de radiació ultraviolada és a la coberta del rover i la unitat de control està muntada dins del cos de rover.[53] S’espera que el REMS aporti noves pistes sobre la circulació general de Mart, els sistemes de micrometeorologia, els cicles hidrològics locals, el potencial destructiu de la radiació ultraviolada i l'habitabilitat de la superfície.[53]
Càmeres per evitar perills (Hazcams)
[modifica]El Curiosity té quatre parells de càmeres de navegació en blanc i negre –dues al davant i dues al darrere- anomenades HazCams (acrònim de l'anglès:Hazard Avoidance Cameras).[49][56] S’utilitzen per a evitar possibles perills durant els desplaçaments del rover i també per a col·locar de manera segura el braç robòtic sobre roques i mostres del sòl.[56] Les càmeres utilitzen llum visible per a obtenir imatges estereogràfiques en 3D.[56] Tenen un camp de visió de 120 graus i poden mapar el terreny que hi hagi fins a 3 m davant del rover.[56] Les imatges que capten les HazCams protegeixen el rover de possibles col·lisions contra obstacles no previstos i funciona en conjunció amb un software que permet al rover prendre ell mateix les decisions per la seva pròpia seguretat.[56]
Mars Hand Lens Imager (MAHLI)
[modifica]El Curiosity duu una càmera incorporada al seu braç robòtic anomenada MAHLI que pot obtenir imatges microscòpiques de roques i de mostres del sòl. Aquesta càmera pot fer fotografies de color real de 1600x1200 píxels amb una resolució de fins a 14,5 micròmetres per píxel. Té una distància focal de 18,3 mm fins a 21,3 mm i un camp de visió de 33,8 a 38,5 graus.[37] La càmera té il·luminació LED amb llum blanca i ultraviolada per poder capturar imatges en la foscor i imatges de fluorescència.[37]
Espectròmetre de raigs X i partícules alfa (APXS)
[modifica]Aquest aparell pot irradiar les mostres amb partícules alfa i mapar l'espectre de raigs X que són reemesos per tal de determinar la composició elemental de les mostres.[57] L'APXS del Curiosity va ser desenvolupat per l'Agència Espacial del Canadà.[57] La companyia canadenca aeroespacial MacDonald Dettwiler va ser la responsable del disseny d'enginyeria i de la fabricació de l'APXS. L'APXS s’aprofita de l'emissió de raigs X induïda per partícules (PIXE) prèviament utilitzada pel Mars Pathfinder i pels Mars Exploration Rovers.[57][58]
Química i mineralogia (CheMin)
[modifica]El CheMin (acrònim de l'anglès Chemistry and Mineralogy) és un instrument que utilitza la difracció de raigs X en pols i que també pot fer servir fluorescència de raigs X.[59] El CheMin és un dels quatre espectròmetres del Curiosity. La seva funció és identificar i quantificar els minerals presents a Mart. Va ser creat per David Blake a l'Ames Research Center de la NASA i al Jet Propulsion Laboratory.[60] El rover pot foradar mostres de pedres i a través d'un tub recollir la mostra resultant en pols i analitzar-la amb el CheMin. Aquest aparell dirigeix un feix de raigs X cap a la pols i l'estructura cristal·lina dels minerals el desvia en un angle característic depenent del mineral, fet que permet als científics identificar quin mineral està sent analitzat.
Anàlisi de mostres a Mart (SAM)
[modifica]
El conjunt d'instruments SAM (acrònim de l'anglès Sample Analysis at Mars) permeten al Curiosity analitzar compostos orgànics i gasos tant de l'atmosfera com de mostres sòlides. Consisteix en una sèrie d'instruments fabricats per la Centre de Vol Espacial Goddard de la NASA, el Laboratoire Inter-Universitaire des Systèmes Atmosphériques i l'empresa Honybee Robotics, juntament amb altres col·laboradors externs.[34][61][62] Els tres aparells principals del SAM són un espectròmetre de masses basat en un quadrupol, un cromatògraf de gasos i un espectròmetre de làser sintonitzable. Aquests instruments tenen per objectiu mesurar de forma precisa les proporcions d'isòtops d'oxigen i carboni en el diòxid de carboni i el metà de l'atmosfera marciana per tal de distingir si tenen un origen biològic o geoquímic.[34][62][63][64][65]
Radiation assessment detector (RAD)
[modifica]Aquest va ser el primer de deu aparells del MSL que va ser activat. La seva primera funció va ser caracteritzar l'ampli espectre de radiació ambiental trobada dins de la nau en la fase de creuer. L'objectiu de fer aquests mesuraments era determinar la viabilitat i les necessitats de protecció d'una potencial exploració humana. Una segona funció d'aquest instrument és caracteritzar la radiació ambiental a la superfície de Mart, cosa que va començar a fer tan bon punt va aterrar.[66]
Dynamic Albedo of Neutrons (DAN)
[modifica]Aquest aparell consisteix en una font d'impulsos de neutrons i un detector per a mesurar l'hidrogen o el gel i l'aigua que hi hagi a la superfície de Mart o a prop de la superfície. L'aparell va ser subministrat per l'Agència Espacial Federal Russa[67][68] i finançat per Rússia.[41]
Mars Descent Imager (MARDI)
[modifica]Durant el descens a la superfície marciana la càmera MARDI va fer fotografies en color de 1600x1200 píxels amb un temps d'exposició d'1,3 mil·lisegons. Va començar a fer-les quan era a una distància de 3,7 km de la superfície i en va seguir fent durant gairebé 2 minuts a un ritme de cinc fotogrames per segon fins que va estar a 5 m del terra.[38][69] Té una escala de píxels que va dels 1,5 m a 2 km de distància fins als 1,5 mm quan està a 2 m i té un camp de visió circular de 90 graus. La MARDI té 8 GB de memòria interna i és capaç de guardar més de 4.000 imatges RAW. Les imatges capturades amb la MARDI van permetre que es pogués fer un mapa del terreny que envolta la zona d'aterratge del Curiosity.[38] La càmera JunoCam, de la sonda Juno, està basada en la MARDI.[70]
Robotic arm
[modifica]
El Curiosity té un braç de 2,1 m amb un extrem en forma de creu que conté cinc dispositius que poden girar en un rang de 350 graus.[71][72] El braç utilitza tres juntures per a estirar-se cap endavant i per a plegar-se quan el rover es desplaça. Aquest braç pesa 30 kg i té un diàmetre, contant les eines que hi té muntades, de 60 cm[73]
Dos dels cinc dispositius són instruments en si, l'APXS i la càmera MAHLI. Els altres tres estan associats amb l'adquisició i la preparació de mostres i són: un trepant, un raspall i un mecanisme per a recollir, tamisar i fraccionar les mostres de roques i sòl en pols.[71][73] El forat que pot fer el trepant en una roca té un diàmetre d'1,6 cm i de 5 cm de profunditat.[72][74] El braç del rover permet situar l'APXS i la MAHLI a prop dels seus objectius i també obtenir mostres en pols de l'interior de les roques i dur-les fins al SAM i el CheMin dins del rover.[72]
Comparacions
[modifica]
El Curiosity té una càrrega útil d'equipament científic avançada a Mart.[29] És el quart rover no tripulat que la NASA ha enviat a Mart des de l'any 1996. Els altres rovers que van anar a Mart amb èxit són l'Spirit i l'Opportunity de la missió Mars Exploration Rover i el rover Sojourner de la missió Mars Pathfinder.
El Curiosity fa 2,9 m de longitud per 2,7 m d'amplada i 2,2 m d'alçada.[7] És més gran que els Mars Exploration Rovers, que feien 1,5 m de longitud i tenen una massa de 174 kg incloent-hi els 6,8 kg d'instruments científics, en comparació als 900 kg del Curiosity.[6][75][76] En comparació a les càmeres PanCam de l'Spirit i l'Opportunity, la MastCam-34 té una resolució òptica 1,25 vegades més alta i la MastCam-100 té una resolució òptica 3,67 vegades més gran.[39]
El líder de la sonda Beagle 2 (Colin Pillinger), va reaccionar animadament quan va saber el nombre de tècnics que monitoraven el descens del Curiosity, ja que ell només en tenia quatre.[77] La missió del Curiosity té un cost 25 vegades superior a la del Beagle 2, la qual va ser elogiada pel seu baix cost, tot i que es va perdre contacte amb ella quan es va separar de la nau Mars Express.[77]
La regió que el rover està previst que explori s’ha comparat amb la regió dels Four Corners dels Estats Units.[78] El cràter Gale té una àrea similar a la dels estats de Connecticut i Rhode Island combinats.[79]
Aterratge
[modifica]Selecció de la zona d'aterratge
[modifica]
Després del primer seminari per a escollir el lloc d'aterratge del Curiosity, es van proposar 33 zones d'aterratge potencials.[82] Quan es va celebrar el segon seminari, cap a finals del 2007, la llista de llocs potencials havia crescut fins a gairebé 50 punts diferents d'aterratge[83] i, en acabar el seminari, la llista es va reduir a només sis llocs[84][85][86] Al novembre de l'any 2008, en un tercer seminari, els caps del projecte van reduir la llista a aquests quatre llocs d'aterratge:[87][88][89][90]
| Nom | Localització | Elevació | Notes |
|---|---|---|---|
| Cràter Eberswalde | 23° 52′ S, 326° 44′ E / 23.86°S,326.73°E | -1.450 m | Hi ha el delta d'un riu antic.[91] |
| Cràter Holden | 26° 22′ S, 325° 06′ E / 26.37°S,325.10°E | -1.940 m | Hi ha el llit d'un llac sec.[92] |
| Cràter Gale | 4° 29′ S, 137° 25′ E / 4.49°S,137.42°E | -4.451 m | Hi ha una muntanya de 5 km (Aeolis Mons) de material estratificat prop del centre.[92][93] Lloc seleccionat.[80] |
| Mawrth Vallis | 24° 01′ N, 341° 02′ E / 24.01°N,341.03°E | -2.246 m | Hi ha un canal format per unes grans inundacions.[94] |
El setembre de 2010 es va realitzar un quart seminari per escollir el lloc d'aterratge[95] i també se’n va fer un cinquè i definitiu del 16 al 18 de maig de 2011.[96] El 22 de juliol de 2011 es va anunciar que el cràter Gale havia estat seleccionat com a lloc d'aterratge per la missió Mars Science Laboratory.
Zona d'aterratge
[modifica]El Curiosity va aterrar a la Fulla de Yellowknife, al Quad 51 d'Aeolis Palus al cràter Gale.[97][98][99][100] Aquesta zona s'ha rebatejat amb el nom de Bradbury Landing (zona d'aterratge Bradbury en català) en honor de Ray Bradbury, autor d'obres de ciència-ficció.[2] El cràter Gale, que s’estima que es va formar per un impacte fa uns tres mil cinc-cents milions d'anys, es creu que s’ha anat omplint gradualment per sedimentació, primer dipositant-se els sediments per l'aigua i després pel vent fins que es va cobrir completament. Després l'erosió del vent es creu que hauria anat retirant els sediments deixant una muntanya de 5,5 km d'alçada, anomenada Aeolis Mons o Muntanya Sharp, al centre del cràter, que fa 154 km. Per això es creu que el Curiosity pot tenir l'oportunitat d'estudiar dos mil milions d'anys d'història marciana analitzant els sediments que han quedat exposats a la muntanya. A més, el seu lloc d'aterratge es creu que és a damunt o a prop d'un ventall al·luvial, que se suposa que és el resultat d'un fluix d'aigua subterrània, ja sigui abans de la deposició dels sediments erosionats o en algun altre moment més proper en la història geològica marciana.[101][102]

Paper del rover en el sistema d'aterratge
[modifica]Els rovers enviats per la NASA a Mart amb anterioritat, es van activar un cop aterrats a la superfície marciana i, per tant, estaven apagats durant l'entrada a l'atmosfera marciana, el descens i l'aterratge. El Curiosity, en canvi, ja estava actiu quan va tocar la superfície de Mart i va fer servir el seu sistema de suspensió per a suavitzar l'aterratge.[103]
El Curiosity va canviar la seva configuració de vol per una configuració d'aterratge mentre la nau MSL el despenjava simultàniament amb una corda de 20 m per aconseguir un aterratge suau a la superfície de Mart.[104][105][106][107] Un cop les rodes del rover van tocar el terra, va esperar dos segons per a confirmar que era damunt de terra ferma i va accionar uns perns explosius que van permetre que el rover es desenganxés de la corda. Aleshores, la nau que ajudava al Curiosity en l'aterratge va anar caient fins a estavellar-se contra el terra i el rover es va començar a preparar per iniciar la part científica de la missió.[81]
Cobertura i impacte cultural
[modifica]
Entre el 23 i el 29 de març de 2009, el públic general va votar en una enquesta oberta que hi havia al web de la NASA per a escollir el nom del rover d'entre 9 noms finalistes.[108] Aquests noms eren: Adventure, Amelia, Journey, Perception, Pursuit, Sunrise, Vision, Wonder i Curiosity.[109] El 27 de maig de 2009 es va anunciar que el nom guanyador era el de Curiosity. El nom havia estat proposat per Clara Ma, una nena de 12 anys de Kansas, en un concurs de redaccions.[108] En un fragment de la redacció s’hi podia llegir: «la curiositat és la passió que ens mou a través de la nostra vida quotidiana».[110]
A la NASA TV, durant la matinada catalana del 6 d'agost del 2012, es podia veure un vídeo en directe amb les primeres imatges de la superfície de Mart i amb entrevistes als membres de la missió. El web de la NASA va deixar de ser accessible durant una estona a causa del gran nombre de persones que l'estaven visitant.[111] Unes 1.000 persones es van reunir a la plaça Times Square de Nova York, on es va poder veure l'emissió en directe de l'aterratge del Curiosity en una pantalla gegant.[112]
El 13 d'agost de 2012, el president dels Estats Units, Barack Obama, va trucar mentre era a bord de l'Air Force One als membres de la NASA que van participar en l'aterratge del Curiosity per felicitar-los, i els va dir: «Sou l'exemple de l'enginy i del coneixement americà. Realment aquest és un èxit increïble.».[113][114]
Segons els científics de l'Institut de Conservació Getty a Los Angeles, Califòrnia, l'instrument CheMin que hi ha a bord del Curiosity podria ser un mitjà potencialment valuós per a examinar obres d'art antigues sense danyar-les. Fins fa poc, hi havia pocs aparells que estiguessin disponibles per a determinar la composició d'una mostra física sense tallar-ne una part que fos prou petita com per a no danyar l'obra d'art. El CheMin, en canvi, dirigeix un feix de raigs X en partícules de 400 micròmetres[115] i llegeix la radiació que li torna dispersada per determinar la composició d'un artefacte en qüestió de minuts. Els enginyers van crear una versió més petita i portàtil del CheMin anomenada X-Duetto. Actualment l'utilitzen els científics del Getty per a analitzar una col·lecció d'antiguitats del museu i de les ruïnes romanes d'Herculà, Itàlia.[116]
Abans de l'aterratge, la NASA i Microsoft van treure el "Mars Rover Landing", un joc gratuït descarregable per Xbox Live que utilitza el Kinect per a captar els moviments corporals, fet que permet als usuaris simular la seqüència d'aterratge del Curiosity.[117]
La NASA va donar al públic general l'oportunitat d'enviar els seus noms a Mart. Més d'1,2 milions de persones d'arreu del món hi van participar, i els seus noms es van gravar en silici utilitzant una màquina de feix d'electrons que s'utilitza per a fabricar microdispositius al Jet Propulsion Laboratory, i el microxip resultant amb tots els noms es va instal·lar a la coberta del Curiosity.[118] Seguint una tradició de 40 anys, es va instal·lar al Curiosity una Placa Presidencial amb les signatures del president Barack Obama i el vicepresident Joe Biden. En una altra part del rover hi ha l'autògraf de Clara Ma, la nena de Kansas que va batejar el Curiosity.[110]
A Catalunya, l'aterratge del Curiosity va ser notícia a tots els diaris de tirada nacional. La majoria d'aquests diaris van destacar el fet que el rover dugués un component dissenyat i fabricat a la UPC per a mesurar la velocitat i la direcció del vent a Mart.[119][120][121][122] La notícia de l'arribada del Curiosity a Mart també va generar debats curiosos, com el de decidir com s'havia de dir a l'arribada del rover: aterratge o amartizatge.[123][124]
Imatges
[modifica]Vídeos
Rover
-
 El braç robòtic i el pal del Curiosity.
El braç robòtic i el pal del Curiosity. -
 El pal del rover on hi ha la ChemCam, la MastCam-34, la MastCam-100 i la NavCam.
El pal del rover on hi ha la ChemCam, la MastCam-34, la MastCam-100 i la NavCam. -
 Les rodes del Curiosity fan 50 cm de diàmetre i hi tenen inscrit en codi morse les lletres JPL, en referència al Jet Propulsion Laboratory.
Les rodes del Curiosity fan 50 cm de diàmetre i hi tenen inscrit en codi morse les lletres JPL, en referència al Jet Propulsion Laboratory.



Fotografies fetes pel Curiosity
-
 L'escut protector de calor de 4.5 m de diàmetre s’allunya del rover, fotografiat per la MARDI, instal·lada a la part inferior del Curiosity. Sol 0 (06-08-2012 05:15 UTC).
L'escut protector de calor de 4.5 m de diàmetre s’allunya del rover, fotografiat per la MARDI, instal·lada a la part inferior del Curiosity. Sol 0 (06-08-2012 05:15 UTC). -
 Primera fotografia feta pel Curiosity després d'aterrar. Es pot observar la roda del rover (6 d'agost de 2012).
Primera fotografia feta pel Curiosity després d'aterrar. Es pot observar la roda del rover (6 d'agost de 2012). -
 Imatge feta per la HazCam del darrere sense coberta per protegir-la de la pols després d'aterrar a Mart.
Imatge feta per la HazCam del darrere sense coberta per protegir-la de la pols després d'aterrar a Mart. -
![Aquesta fotografia mostra al fons Aeolis Mons (o Muntanya Sharp), el principal objectiu científic de la missió (6 d'agost de 2012).[125]](//upload.wikimedia.org/wikipedia/commons/thumb/6/65/673885main_PIA15986-full_full.jpg/140px-673885main_PIA15986-full_full.jpg) Aquesta fotografia mostra al fons Aeolis Mons (o Muntanya Sharp), el principal objectiu científic de la missió (6 d'agost de 2012).[125]
Aquesta fotografia mostra al fons Aeolis Mons (o Muntanya Sharp), el principal objectiu científic de la missió (6 d'agost de 2012).[125] -
 Primera imatge en color del paisatge marcià, capturada per la MAHLI del Curiosity (6 d'agost de 2012).
Primera imatge en color del paisatge marcià, capturada per la MAHLI del Curiosity (6 d'agost de 2012). -
![Roderes deixades després del primer desplaçament fet pel Curiosity, fotografiat amb una NavCam (22 d'agost de 2012).[2]](//upload.wikimedia.org/wikipedia/commons/thumb/6/63/PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg/140px-PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg) Roderes deixades després del primer desplaçament fet pel Curiosity, fotografiat amb una NavCam (22 d'agost de 2012).[2]
Roderes deixades després del primer desplaçament fet pel Curiosity, fotografiat amb una NavCam (22 d'agost de 2012).[2] -
 Vista del Curiosity d'Aeolis Mons el dia 9 d'agost de 2012. Imatge amb balanç de blancs.
Vista del Curiosity d'Aeolis Mons el dia 9 d'agost de 2012. Imatge amb balanç de blancs. -
 Fotografia on s’observen les capes a la base d'Aeolis Mons.
Fotografia on s’observen les capes a la base d'Aeolis Mons.



![Aquesta fotografia mostra al fons Aeolis Mons (o Muntanya Sharp), el principal objectiu científic de la missió (6 d'agost de 2012).[125]](/wiki/Fitxer:673885main_PIA15986-full_full.jpg)

![Roderes deixades després del primer desplaçament fet pel Curiosity, fotografiat amb una NavCam (22 d'agost de 2012).[2]](/wiki/Fitxer:PIA16094-Mars_Curiosity_Rover-First_Drive_Tracks.jpg)


Vistes aèrees
-
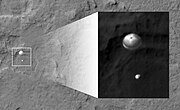 El Curiosity descendint sota el seu paracaigudes. Imatge obtinguda pel Mars Reconnaissance Orbiter.
El Curiosity descendint sota el seu paracaigudes. Imatge obtinguda pel Mars Reconnaissance Orbiter. -
 Aeolis Palus és la zona on va aterrar el rover, a prop d'Aeolis Mons. El nord és avall.
Aeolis Palus és la zona on va aterrar el rover, a prop d'Aeolis Mons. El nord és avall. -
 Lloc d'aterratge del Curiosity. El rover va aterrar a la Fulla de Yellowknife al Quad 51 d'Aeolis Palus.
Lloc d'aterratge del Curiosity. El rover va aterrar a la Fulla de Yellowknife al Quad 51 d'Aeolis Palus. -
 Punt verd:lloc d'aterratge del Curiosity. Punts blaus:algunes zones que el rover explorarà.
Punt verd:lloc d'aterratge del Curiosity. Punts blaus:algunes zones que el rover explorarà. -
 Fotografia feta pel Mars Reconnaissance Orbiter de les deixalles espacials que ha deixat a Mart la missió Mars Science Laboratory.
Fotografia feta pel Mars Reconnaissance Orbiter de les deixalles espacials que ha deixat a Mart la missió Mars Science Laboratory. -
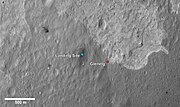 El punt blau assenyala el lloc d'aterratge del Curiosity. El punt vermell marca Glenelg, una zona del cràter Gale on està previst que el rover hi vagi a fer exploració científica.
El punt blau assenyala el lloc d'aterratge del Curiosity. El punt vermell marca Glenelg, una zona del cràter Gale on està previst que el rover hi vagi a fer exploració científica. -
 Lloc d'aterratge del Curiosity fotografiat per la càmera HiRISE del Mars Reconnaissance Orbiter (14 d'agost de 2012).
Lloc d'aterratge del Curiosity fotografiat per la càmera HiRISE del Mars Reconnaissance Orbiter (14 d'agost de 2012).






_-_HiRISE_-_20120814.jpg)
- Imatges panoràmiques

Vegeu també
[modifica]- Astrobiologia
- ExoMars
- Mars Exploration Rover
- Mars Express
- Mars Pathfinder
- Mars Reconnaissance Orbiter
- Objectes artificials a la superfície de Mart
- Orbitador Odyssey
- Opportunity
- Spirit
- Perseverance
Mapa de Mart
[modifica]El següent mapa d'imatge del planeta Mart conté enllaços interns a característiques geogràfiques destacant les ubicacions de Rovers i mòduls de descens. Feu clic en les característiques i us enllaçarà a les pàgines dels articles corresponents. El nord està a la part superior; les elevacions: vermell (més alt), groc (zero), blau (més baix).

Referències
[modifica]- ↑ «MSL Sol 3 Update» (en anglès). NASA Television, 08-08-2012. [Consulta: 9 agost 2012].
- ↑ 2,0 2,1 2,2 ; Cole, Steve; Webster, Guy; Agle, D.C.«NASA Mars Rover Begins Driving at Bradbury Landing» (en anglès). NASA, 22-08-2012. Arxivat de l'original el 15 de novembre 2016. [Consulta: 22 agost 2012].
- ↑ 3,0 3,1 «Impressive' Curiosity landing only 1.5 miles off, NASA says» (en anglès). [Consulta: 10 agost 2012].
- ↑ 4,0 4,1 4,2 «Overview» (en anglès). JPL, NASA. [Consulta: 16 agost 2012].
- ↑ 5,0 5,1 5,2 «Mars Science Laboratory: Mission Science Goals» (en anglès). JPL. NASA, 01-08-2012. [Consulta: 3 setembre 2012].
- ↑ 6,0 6,1 6,2 Watson, Traci «Troubles parallel ambitions in NASA Mars project» (en anglès). USA Today, 14-04-2008 [Consulta: 27 maig 2009].
- ↑ 7,0 7,1 «MSL at a glance - CNES» (en anglès). Cnes.fr. [Consulta: 3 setembre 2012].
- ↑ 8,0 8,1 8,2 «Multi-Mission Radioisotope Thermoelectric Generator» (PDF) (en anglès). NASA/JPL, 01-01-2008. Arxivat de l'original el 13 d'agost 2012. [Consulta: 6 agost 2012].
- ↑ 9,0 9,1 «Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration» (pdf) (en anglès). NASA/JPL, 18-04-2006. Arxivat de l'original el 12 d'octubre 2012. [Consulta: 3 setembre 2012].
- ↑ «Mars Science Laboratory Launch Nuclear Safety» (en anglès). NASA/JPL/DoE, 02-03-2011. Arxivat de l'original el 8 de novembre 2014. [Consulta: 28 novembre 2011].
- ↑ 11,0 11,1 «Technologies of Broad Benefit: Power» (en anglès). Arxivat de l'original el 14 de juny 2008. [Consulta: 20 setembre 2008].
- ↑ INL. «Mars Science Laboratory team accomplishes mission goal by working together» (en anglès). Idaho National Laboratory. Arxivat de l'original el 2012-09-25. [Consulta: 12 agost 2012].
- ↑ «Mars Science Laboratory – Technologies of Broad Benefit: Power» (en anglès). NASA/JPL. [Consulta: 23 abril 2011].
- ↑ Ajay K. Misra. «Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power» (en anglès). NASA/JPL, 26-06-2006. Arxivat de l'original el 9 d'agost 2012. [Consulta: 12 maig 2009].
- ↑ 15,0 15,1 15,2 15,3 15,4 15,5 15,6 DESCANSO Design and Performance Summary Series (en anglès), novembre 2009 [Consulta: 7 agost 2012]. «Mars Science Laboratory Telecommunications System Design- Article 14»
- ↑ 16,0 16,1 Watanabe, Susan. «Keeping it Cool (...or Warm!)» (en anglès). NASA/JPL, 09-08-2009. Arxivat de l'original el 2013-05-21. [Consulta: 19 gener 2011].
- ↑ 17,0 17,1 17,2 17,3 17,4 «Mars Science Laboratory: Mission: Rover: Brains» (en anglès). NASA/JPL. [Consulta: 17 març 2009].
- ↑ Bajracharya, Max; Mark W. Maimone; Daniel Helmick «Autonomy for Mars rovers: past, present, and future» (en anglès). Computer, 41, 12, 12-2008, pàg. 45. ISSN: 0018-9162.
- ↑ (2008-06-17). "BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions" (en anglès). Nota de premsa. Consulta: 2008-11-17.
- ↑ «RAD750 radiation-hardened PowerPC microprocessor» (PDF) (en anglès). BAE Systems, 01-07-2008 [Consulta: 7 setembre 2009].
- ↑ «RAD6000 Space Computers» (PDF) (en anglès). BAE Systems, 23-06-2008 [Consulta: 7 setembre 2009]. «Còpia arxivada». Arxivat de l'original el 2009-10-04. [Consulta: 3 setembre 2012].
- ↑ «Mars-Earth distance in light minutes» (en anglès). WolframAlpha. [Consulta: 6 agost 2012].
- ↑ «Curiosity's data communication with Earth» (en anglès). NASA. [Consulta: 7agost 2012].
- ↑ «ESA spacecraft records crucial NASA signals from Mars» (en anglès). Mars Daily, 07-08-2012 [Consulta: 3 setembre 2012].
- ↑ «Next Mars Rover Sports a Set of New Wheels» (en anglès). NASA/JPL. Arxivat de l'original el 2014-07-05. [Consulta: 3 setembre 2012].
- ↑ «Watch NASA's Next Mars Rover Being Built Via Live 'Curiosity Cam'» (en anglès). NASA, 13-09-2011. Arxivat de l'original el 26 de novembre 2011. [Consulta: 16 agost 2012].
- ↑ «New Mars Rover to Feature Morse Code» (en anglès). National Association for Amateur Radio.
- ↑ NASA «Looking Toward the Open Road» (en anglès). JPL - Martian Diaries, 29-08-2012 [Consulta: 3 setembre 2012].
- ↑ 29,0 29,1 29,2 «MSL – Fulla de fets (anglès)». Arxivat de l'original el 2012-08-08. [Consulta: 3 setembre 2012].
- ↑ Primera conducció (anglès)
- ↑ Gorman, Steve «Curiosity beams Mars images back» (en anglès). Stuff - Science, 08-08-2011 [Consulta: 8 agost 2012].
- ↑ 32,0 32,1 «Mars Science Laboratory — Homepage» (en anglès). NASA. Arxivat de l'original el 2009-07-30. [Consulta: 3 setembre 2012].
- ↑ Amos, Jonathan «Gale Crater: Geological 'sweet shop' awaits Mars rover» (en anglès). BBC News, 03-08-2012 [Consulta: 6 agost 2012].
- ↑ 34,0 34,1 34,2 «MSL Science Corner: Sample Analysis at Mars (SAM)» (en anglès). NASA/JPL. Arxivat de l'original el 20 de juliol 2011. [Consulta: 9 setembre 2009].
- ↑ Malin, M. C.; Bell, J. F.; Cameron, J.; Dietrich, W. E.; Edgett, K. S.; Hallet, B.; Herkenhoff, K. E.; Lemmon, M. T.; Parker, T. J. «The Mast Cameras and Mars Descent Imager (MARDI) for the 2009 Mars Science Laboratory» (pdf) (en anglès). 36th Annual Lunar and Planetary Science Conference, 36, 2005, pàg. 1214.
- ↑ 36,0 36,1 36,2 36,3 36,4 «Mast Camera (Mastcam)» (en anglès). NASA/JPL. Arxivat de l'original el 2012-08-08. [Consulta: 18 març 2009].
- ↑ 37,0 37,1 37,2 «Mars Hand Lens Imager (MAHLI)» (en anglès). NASA/JPL. Arxivat de l'original el 2012-08-15. [Consulta: 23 març 2009].
- ↑ 38,0 38,1 38,2 «Mars Descent Imager (MARDI)» (en anglès). NASA/JPL. Arxivat de l'original el 7 d'agost 2012. [Consulta: 3 abril 2009].
- ↑ 39,0 39,1 39,2 «Mars Science Laboratory (MSL): Mast Camera (Mastcam): Instrument Description» (en anglès). Malin Space Science Systems. [Consulta: 19 abril 2009].
- ↑ «Mars Science Laboratory Instrumentation Announcement from Alan Stern and Jim Green, NASA Headquarters» (en anglès). MarsToday.com, 08-11-2007. [Consulta: 6 agost 2012].
- ↑ 41,0 41,1 «Mars Science Laboratory: Mission» (en anglès). NASA JPL. [Consulta: 6 agost 2012].
- ↑ David, Leonard «NASA Nixes 3-D Camera for Next Mars Rover» (en anglès). Space.com, 28-03-2011 [Consulta: 6 agost 2012].
- ↑ 43,0 43,1 43,2 «- How does ChemCam work? How Does ChemCam Work?» (en anglès). ChemCam Team, 2011. [Consulta: 20 agost 2012].
- ↑ 44,0 44,1 44,2 «MSL Science Corner: Chemistry & Camera (ChemCam)» (en anglès). NASA/JPL. Arxivat de l'original el 20 de juliol 2011. [Consulta: 9 setembre 2009].
- ↑ Wiens, Roger C.; Equip científic de la Chem Cam. «ChemCam Fact Sheet» (pdf) (en anglès), 01-07-2004. Arxivat de l'original el 8 de febrer 2012. [Consulta: 30 agost 2012].
- ↑ «Rover's Laser Instrument Zaps First Martian Rock.» (en anglès), 2012. Arxivat de l'original el 14 de juny 2013. [Consulta: 20 agost 2012].
- ↑ «Comparative study of different methodologies for quantitative rock analysis by Laser-Induced Breakdown Spectroscopy in a simulated Martian atmosphere» (PDF) (en anglès). Spectrochimica Acta Part B-Atomic Spectroscopy, 61, 3, 2006, pàg. 301–313.
- ↑ «Corrections and Clarifications, News of the Week» (en anglès). Science, 322, 5907, 2008, pàg. 1466.
- ↑ 49,0 49,1 «Mars Science Laboratory Rover in the JPL Mars Yard» (en anglès). NASA/JPL. Arxivat de l'original el 10 de maig 2009. [Consulta: 10 maig 2009].
- ↑ Primer Mosaic de la NavCam (anglès)
- ↑ Pierre und Marie Curie University. «Rover Environmental Monitoring Station for MSL mission» (en anglès). 4th International workshop on the Mars Atmosphere: modelling and observations, 01-02-2011. [Consulta: 6 agost 2012].
- ↑ 53,0 53,1 53,2 53,3 «MSL Science Corner: Rover Environmental Monitoring Station (REMS)» (en anglès). NASA/JPL. Arxivat de l'original el 20 de juliol 2011. [Consulta: 9 setembre 2009].
- ↑ «Mars Science Laboratory Fact Sheet» (en anglès). NASA/JPL. [Consulta: 20 juny 2011].
- ↑ «Un peu a Mart, amb el ‘Curiosity’». UPC, 06-03-2012. [Consulta: 1r setembre 2012].
- ↑ 56,0 56,1 56,2 56,3 56,4 «Mars Science Laboratory: Mission: Rover: Eyes and Other Senses: Four Engineering Hazcams (Hazard Avoidance Cameras)» (en anglès). NASA/JPL. [Consulta: 4 abril 2009].
- ↑ 57,0 57,1 57,2 «MSL Science Corner: Alpha Particle X-ray Spectrometer (APXS)» (en anglès). NASA/JPL. Arxivat de l'original el 20 de juliol 2011. [Consulta: 9 setembre 2009].
- ↑ «The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers» (en anglès). J. Geophysical Research, 108, 2003, pàg. 8066.
- ↑ «MSL Chemistry & Mineralogy X-ray diffraction(CheMin)» (en anglès). NASA/JPL. [Consulta: 25 novembre 2011].
- ↑ «Field deployment of a portable X-ray diffraction/X-ray fluorescence instrument on Mars analog terrain» (en anglès). Powder Diffraction, 20, 2, 2005, pàg. 128–133.
- ↑ Cabane, M. [et al]. «Did life exist on Mars? Search for organic and inorganic signatures, one of the goals for "SAM" (sample analysis at Mars)» (en anglès). Advances in Space Research, 33, 12, 2004, pàg. 2240–2245.
- ↑ 62,0 62,1 «Sample Analysis at Mars (SAM) Instrument Suite» (en anglès). NASA, 01-10-2008. Arxivat de l'original el 29 de juliol 2010. [Consulta: 9 octubre 2009].
- ↑ Tenenbaum, D. «Making Sense of Mars Methane» (en anglès). Astrobiology Magazine, 09-06-2008. [Consulta: 8 octubre 2008].
- ↑ Tarsitano, C. G.; Webster, C. R. «Multilaser Herriott cell for planetary tunable laser spectrometers» (en anglès). Applied Optics, 46, 28, 2007, pàg. 6923–6935.
- ↑ Mahaffy, Paul R. «The Sample Analysis at Mars Investigation and Instrument Suite» (en anglès). Space Science Reviews, 2012.
- ↑ «SwRI Radiation Assessment Detector (RAD) Homepage» (en anglès). Southwest Research Institute. [Consulta: 19 gener 2011].
- ↑ «MSL Science Corner: Dynamic Albedo of Neutrons (DAN)». NASA/JPL. Arxivat de l'original el 20 de juliol 2011. [Consulta: 9 setembre 2009].
- ↑ Litvak, M.L.; Mitrofanov, I.G.; Barmakov, Yu.N.; Behar, A.; Bitulev, A.; Bobrovnitsky, Yu.; Bogolubov, E.P.; Boynton, W.V.; Bragin, S.I. «The Dynamic Albedo of Neutrons (DAN) Experiment for NASA's 2009 Mars Science Laboratory» (en anglès). Astrobiology, 8, 3, 2008, pàg. 605–12.
- ↑ «Mars Descent Imager (MARDI) Update» (en anglès). Malin Space Science Systems, 12-11-2007. [Consulta: 6 agost 2012].
- ↑ «Junocam, Juno Jupiter Orbiter» (en anglès). Malin Space Science Systems. [Consulta: 6 agost 2012].
- ↑ 71,0 71,1 «Curiosity Rover - Arm and Hand» (en anglès). JPL. NASA. [Consulta: 21 agost 2012].
- ↑ 72,0 72,1 72,2 «Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges» (PDF) (en anglès). NASA. [Consulta: 21 agost 2012].
- ↑ 73,0 73,1 NASA «Curiosity Stretches its Arm» (en anglès). JPL, 21-08-2012 [Consulta: 21 agost 2012]. Arxivat 22 August 2012[Date mismatch] a Wayback Machine. «Còpia arxivada». Arxivat de l'original el 2012-08-22. [Consulta: 3 setembre 2012].
- ↑ «MSL Participating Scientists Program - Proposal Information Package» (PDF) (en anglès). Washington University, 14-12-2010. [Consulta: 21 agost 2012].
- ↑ Mars Rovers: Pathfinder, MER (Spirit and Opportunity), and MSL (en anglès). Pasadena, California. 2008-04-12. Consulta: 2011-09-22.
- ↑ «Mars Exploration Rover Launches» (PDF) (en anglès). NASA, 01-06-2003. [Consulta: 6 agost 2012].
- ↑ 77,0 77,1 Watching Curiosity on Mars makes me feel like athlete who didn’t win a medal (anglès) The Sun, 8 agost 2012.
- ↑ «NASA - PIA16068 (anglès)». Arxivat de l'original el 2014-11-29. [Consulta: 3 setembre 2012].
- ↑ «NASA - PIA15987(anglès)». Arxivat de l'original el 2016-03-04. [Consulta: 3 setembre 2012].
- ↑ 80,0 80,1 «Mars rover aims for deep crater» (en anglès). BBC News, 22-07-2011 [Consulta: 22 juliol 2011].
- ↑ 81,0 81,1 Amos, Jonathan «Nasa's Curiosity rover targets smaller landing zone» (en anglès). BBC News, 12-06-2012 [Consulta: 12 juny 2012].
- ↑ «MSL Landing Site Selection User’s Guide to Engineering Constraints» (PDF) (en anglès), 12-06-2006. [Consulta: 29 maig 2007].
- ↑ «Second MSL Landing Site Workshop» (en anglès).
- ↑ «MSL Workshop Voting Chart» (PDF) (en anglès), 18-09-2008.
- ↑ GuyMac. «Reconnaissance of MSL Sites» (en anglès). HiBlog, 04-01-2008. [Consulta: 21 octubre 2008].
- ↑ «Mars Exploration Science Monthly Newsletter» (PDF) (en anglès), 01-08-2008. Arxivat de l'original el 21 de juliol 2011. [Consulta: 3 setembre 2012].
- ↑ «Site List Narrows For NASA's Next Mars Landing» (en anglès). MarsToday, 19-11-2008. [Consulta: 21 abril 2009].
- ↑ «Current MSL Landing Sites» (en anglès). NASA. Arxivat de l'original el 15 de març 2012. [Consulta: 4 gener 2010].
- ↑ «Looking at Landing Sites for the Mars Science Laboratory» (en anglès). NASA/JPL, 17-05-2009. [Consulta: 28 maig 2009].
- ↑ «Final 7 Prospective Landing Sites» (en anglès). NASA, 19-02-2009. Arxivat de l'original el 13 d’abril 2011. [Consulta: 9 febrer 2009].
- ↑ [«Mars Science Laboratory: Possible MSL Landing Site: Eberswalde Crater (anglès)». Arxivat de l'original el 2012-01-27. [Consulta: 3 setembre 2012]. Mars Science Laboratory: Possible MSL Landing Site: Eberswalde Crater (anglès)]
- ↑ 92,0 92,1 [«Mars Science Laboratory: Possible MSL Landing Site: Holden Crater (anglès)». Arxivat de l'original el 2012-04-30. [Consulta: 3 setembre 2012]. Mars Science Laboratory: Possible MSL Landing Site: Holden Crater (anglès)]
- ↑ [«Mars Science Laboratory: Possible MSL Landing Site: Gale Crater (anglès)». Arxivat de l'original el 2012-01-17. [Consulta: 3 setembre 2012]. Mars Science Laboratory: Possible MSL Landing Site: Gale Crater (anglès)]
- ↑ [«Mars Science Laboratory: Possible MSL Landing Site: Mawrth Vallis (anglès)». Arxivat de l'original el 2012-08-28. [Consulta: 3 setembre 2012]. Mars Science Laboratory: Possible MSL Landing Site: Mawrth Vallis (anglès)]
- ↑ http://marsoweb.nas.nasa.gov/landingsites/msl/workshops/4th_workshop/program.html Presentations for the Fourth MSL Landing Site Workshop (anglès)] Setembre 2010
- ↑ Second Announcement for the Final MSL Landing Site Workshop and Call for Papers (anglès) Març 2011
- ↑ «Curiosity's Quad - IMAGE» (en anglès). NASA, 10-08-2012. [Consulta: 11 agost 2012].
- ↑ ; Webster, Guy; Brown, Dwayne«NASA's Curiosity Beams Back a Color 360 of Gale Crate» (en anglès). NASA, 09-08-2012. Arxivat de l'original el 2 de juny 2016. [Consulta: 11 agost 2012].
- ↑ Amos, Jonathan «Mars rover makes first colour panorama» (en anglès). BBC News, 09-08-2012 [Consulta: 9 agost 2012].
- ↑ Halvorson, Todd «Quad 51: Name of Mars base evokes rich parallels on Earth» (en anglès). USA Today, 09-08-2012 [Consulta: 12 agost 2012].
- ↑ Hand, Eric. «Crater mound a prize and puzzle for Mars rover» (en anglès). Nature, 03-08-2012. [Consulta: 6 agost 2012].
- ↑ «Gale Crater's History Book» (en anglès). Mars Odyssey THEMIS. [Consulta: 6 agost 2012].
- ↑ «Why NASA's Mars Curiosity Rover landing will be "Seven Minutes of Absolute Terror"» (en anglès). Centre National d'Etudes Spatiales (CNES). NASA, 28-06-2012 [Consulta: 13 juliol 2012].
- ↑ «Final Minutes of Curiosity's Arrival at Mars» (en anglès). NASA/JPL. [Consulta: 8 abril 2011].
- ↑ «Sky Crane – how to land Curiosity on the surface of Mars» (en anglès). Scientific American, 28-11-2011. [Consulta: 6 agost 2012].
- ↑ «Mars rover lands on Xbox Live» (en anglès). USA Today, 17-05-2012 [Consulta: 27 juliol 2012].
- ↑ «Mars Science Laboratory: Entry, Descent, and Landing System Performance» (en anglès). NASA p. 7, 01-03-2006.
- ↑ 108,0 108,1 «Name NASA's Next Mars Rover» (en anglès). NASA/JPL, 27-05-2009. Arxivat de l'original el 18 de setembre 2012. [Consulta: 27 maig 2009].
- ↑ [«Nom del mars rover (anglès)». Arxivat de l'original el 2012-08-10. [Consulta: 3 setembre 2012]. Nom del mars rover (anglès)]
- ↑ 110,0 110,1 «NASA's Curiosity rover flying to Mars with Obama's, others' autographs on board» (en anglès). [Consulta: 11 agost 2012].
- ↑ «Curiosity Lands on Mars» (en anglès). NASA TV. Arxivat de l'original el 6 d'agost 2012. [Consulta: 6 agost 2012].
- ↑ «Huge Crowds Watched NASA Rover Land on Mars from NYC's Times Square» (en anglès). Space.com. [Consulta: 8 agost 2012].
- ↑ Chang, Kenneth «Mars Looks Quite Familiar, if Only on the Surface» (en anglès). New York Times, 13-08-2012 [Consulta: 14 agost 2012].
- ↑ «Barack Obama felicitant als membres de la missió (minut 7:20)» (.mov) (en anglès). NASA, 2012. [Consulta: 3 setembre 2012].
- ↑ «inXitu Press Release» (en anglès), 10-03-2011. Arxivat de l'original el 3 d'agost 2012. [Consulta: 13 agost 2012].
- ↑ «Martian rover tech has an eye for priceless works of art» (en anglès), 10-08-2012. [Consulta: 13 agost 2012].
- ↑ «'Mars Rover Landing' with Kinect for the Xbox 360» (en anglès). Newsday.com. [Consulta: 8 agost 2012].
- ↑ «Send Your Name to Mars» (en anglès). NASA, 2010. Arxivat de l'original el 2012-08-07. [Consulta: 7 agost 2012].
- ↑ «El 'Curiosity' inclou un microxip de disseny català». EFE. Diari Ara, 06-08-2012 [Consulta: 3 setembre 2012].
- ↑ «Los chips de la UPC aterrizan en Marte para medir la velocidad del viento» (en castellà). La Vanguardia, 06-08-2012 [Consulta: 3 setembre 2012].
- ↑ Catanzaro, Michele «El 'Curiosity' lleva hasta Marte un laboratorio del CSIC y la Politècnica» (en castellà). El Periódico de Catalunya, 06-08-2012 [Consulta: 3 setembre 2012].
- ↑ «La UPC participa en la missió amb un xip per mesurar el vent». El Punt Avui, 07-08-2012 [Consulta: 3 setembre 2012].
- ↑ «'Aterrizar', mejor que 'amartizar'». La Vanguardia, 03-08-2012 [Consulta: 3 setembre 2012].
- ↑ «El Curiosity, ha “aterrat” realment a Mart?». Vilaweb, 08-08-2012 [Consulta: 3 setembre 2012].
- ↑ 125,0 125,1 Williams, John. «A 360-degree 'street view' from Mars» (en anglès). PhysOrg, 15-08-2012. [Consulta: 16 agost 2012].
- ↑ Primera panoràmica en color de 360 graus
{kind=link}
Enllaços externs
[modifica]A Wikimedia Commons hi ha contingut multimèdia relatiu a: Curiosity
- Curiosity Rover – Pagina principal – NASA/JPL (anglès)
- MSL - Curiosity "StreetView" (Sol 2 - 08/08/2012) - NASA/JPL – Panoràmica 360° Arxivat 2012-08-19 a Wayback Machine.
| Generalitats |  | |
|---|---|---|
| Areografia | Aeolis Palus • Arandas • Ascraeus Mons • Bradbury Landing • Cerberus Fossae • Cydonia Mensae • Dao Vallis • Gale • Gússev • Elysium Mons • Endeavour • Guèiser marcià • Hellas Planitia • Mare Erythraeum • Newton • Noctis Labyrinthus • Olympus Mons • Tharsis • Tharsis Tholus • Utopia Planitia • Valles Marineris • Vastitas Borealis | |
| Satèl·lits | ||
| Exploració | ||
| Astronomia | ||
| Meteorits | ||
| Altres temes | ||